stm32h747-DCMI-OV5640
1 照相机模块和基本概念
1.1 成像的基本概念
像素:图像上的每个点,体现了彩色图像的颜色或黑白照片的灰度。
分辨率:图像中像素的数量。像素越多,图像尺寸越大。当图像尺寸相同时,像素的数量越多,图像包含的细节越丰富。
色深(位深):用于指示像素颜色的位数。也被称为每像素位数(bpp)。
- 对于二值图像,每个像素包含一位。每个像素为黑色或白色(0或1)。
- 对于灰度图,图像通常为2 bpp(每个像素可以有4级灰阶中的1级)至8 bbp(每个像素可以有256级灰阶中的1级)。
- 对于彩色图像,每个像素的位数为8至24不等(每个像素最多可以有16777216种可能的颜色)
帧率:每秒传输的帧(或图像)数,表示为帧每秒(FPS)
水平消隐(Horizontal blanking):一行末尾与下一行开头之间被忽略的行。![]()
垂直消隐(Vertical blanking):帧最后一行末尾与下一帧第一行开头之间被忽略的行。![]()
逐行扫描:在构建图像时,逐行扫描时,先绘制第一行,然后是第二行,直到整帧完成。
隔行扫描:每一帧分为两个场,即奇数行(1,3,5..)和偶数行(2,4..)。在构建图像时时,先画奇数行,再画偶数行,交替显示。
1.2 颜色概念
亮度(Brightness):
通常与 RGB 三通道的整体强度相关,可以近似用加权平均计算:𝐿 = 0.299⋅𝑅 + 0.587⋅𝐺 + 0.114⋅𝐵
调高亮度就是同时提高 R/G/B 的数值,调低则降低。
对比度(Contrast)
对比度不是单个像素的属性,而是图像整体的 亮度差异范围。在数值上,常用公式:C = (𝐿𝑚𝑎𝑥 − 𝐿𝑚𝑖𝑛) / (𝐿𝑚𝑎𝑥 + 𝐿𝑚𝑖𝑛)
提高对比度意味着把亮的像素更亮,暗的更暗(拉伸亮度范围)。
饱和度(Saturation)
饱和度是颜色相对灰度的偏离程度。转换到 HSL/HSV 空间时,饱和度定义为:𝑆 = (𝑚𝑎𝑥(𝑅,𝐺,𝐵) − 𝑚𝑖𝑛(𝑅,𝐺,𝐵)) / 𝑚𝑎𝑥(𝑅,𝐺,𝐵)
降低饱和度就是让 R/G/B 更接近,趋向灰色。
透明度(Opacity / Alpha)
透明度描述一个像素的“可见程度”或“遮挡程度”。前景图像的透明度决定其与背景的融合程度。
1.3 照相机模块
照相机模块由四部分组成:图像传感器、镜头、印刷电路板(PCB)和接口
镜头:镜头是一种光学镜片,能够将真实场景的光线聚焦到图像传感器上。
图像传感器:一种模拟设备,能够将接收到的光转换为电子信号。这些信号传输构成数字图像的信息。数字照相机中可以使用两种类型的传感器:
- CCD (电荷耦合器件):传统方案,成像质量好,但功耗高、成本高。
- CMOS (互补金属氧化物半导体):成本低、功耗低、集成度高,现在已经成为主流。
印刷电路板 (PCB):摄像头的“底座和电源管理中心”,是摄像头模组里的电路板,负责:给传感器提供合适的电源极性和稳定性。支撑和连接整个摄像头模块的其他元件。
照相机模块的互联:照相机接口是一种桥接器,能够将图像传感器连接到嵌入式系统并发送或接收信号。照相机与嵌入式系统之间传输的信号主要是:
• 控制信号
• 图像数据信号
• 电源信号
• 照相机配置信号。
根据数据信号的传输方式,可将照相机接口分为两种类型:并行和串行接口。
1.4 照相机模块与嵌入式系统的连接(并行接口)
照相机模块需要四种主要类型的信号来正确发送图像数据:控制信号、图像数据信号、电源信号和照相机配置信号。
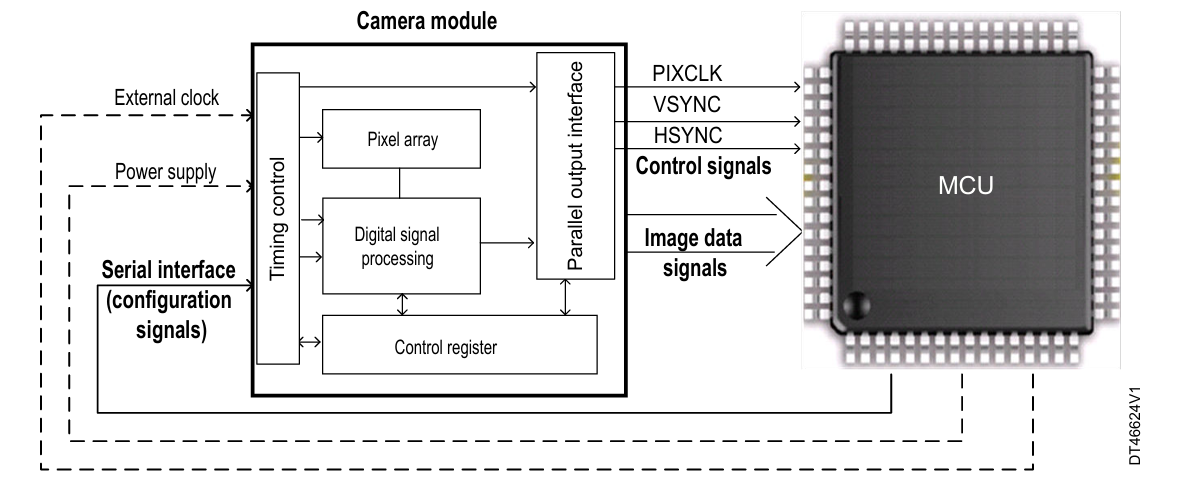
控制信号:摄像头模块和MCU间进行时序同步(时钟、HSYNC、VSYNC)。
图像数据信号:传输像素数据,宽度决定带宽。
电源信号:提供工作电压。
配置信号:通过寄存器设置图像参数和接口模式
- 配置图像分辨率、格式(RGB/YUV/RAW)、帧率
- 配置图像质量参数(亮度、对比度等)
- 接口类型选择(并行接口 / 串行接口)
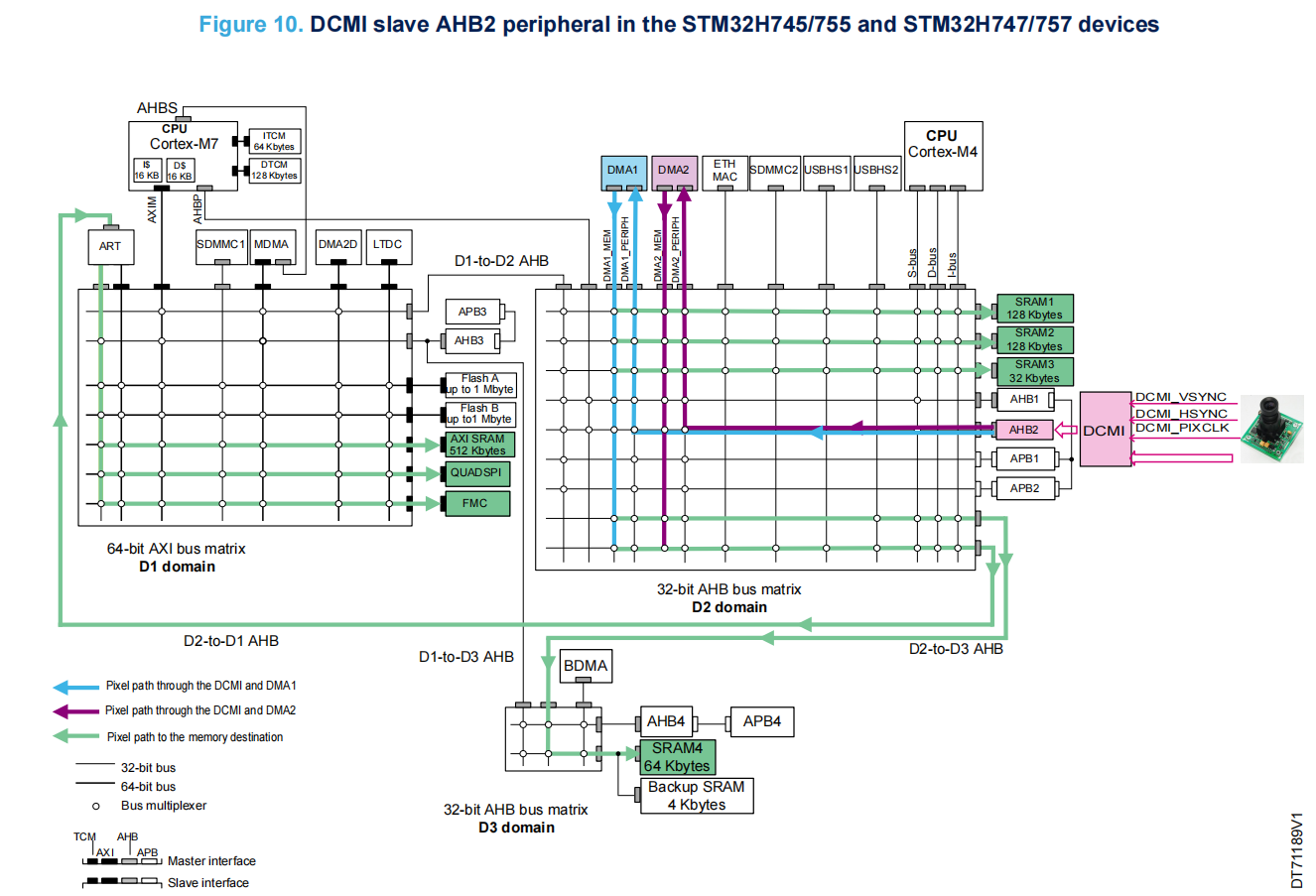
2 Stm32h747中的DCMI
DCMI通过AHB2外设总线连接到AHB总线矩阵。DMA将DCMI模块所接收到的图像数据搬移到目标内存中。
STM32H747 DCMI 特性:
- 接口类型:并行摄像头接口,支持 8~14 位数据线 + 像素时钟。
- 同步方式:支持 HSYNC/VSYNC 或嵌入式同步码。
- 采集模式:连续采集(视频流)或快照采集(单帧)。
- 功能:支持裁剪(只采集图像的一部分)。
- 时钟要求:AHB 时钟必须 ≥ 2.5 × PIXCLK。
- 数据格式:Raw Bayer、YCbCr 4:2:2、RGB565、JPEG 压缩。
- 8 级FIFO(8个32 位的硬件缓冲队列)
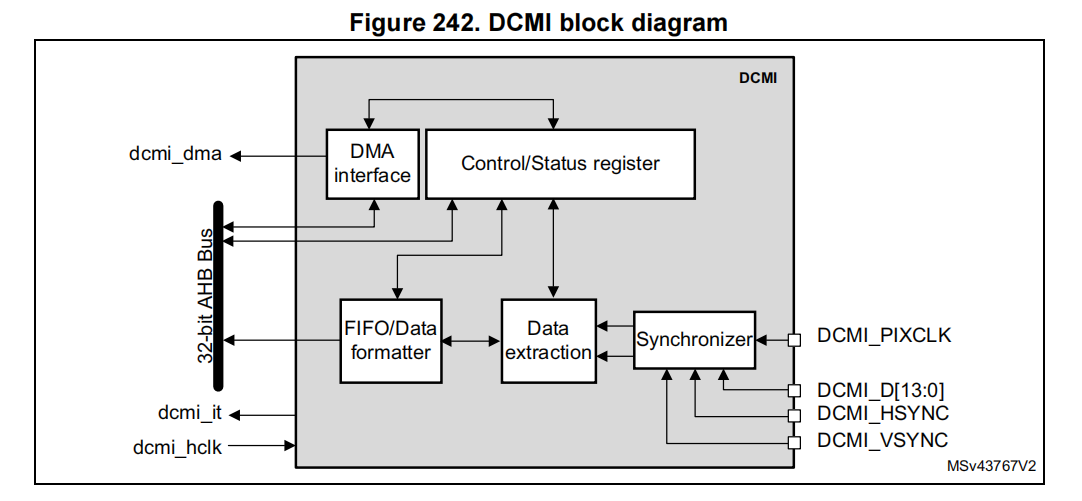
为了减少系统总线争用并避免数据丢失,即使在接口数据速率很高的情况下,接收的数据也会先打包到一个 FIFO 缓冲区中。根据接口位宽(8、10、12 或 14 位),2 或 4 个数据项会存储在一个 32 位字中。一旦形成完整的 32 位字,就通过 DMA 传输到内存。这种方式可以降低 DCMI 对总线带宽的占用,即使在高速情况下也能保证稳定。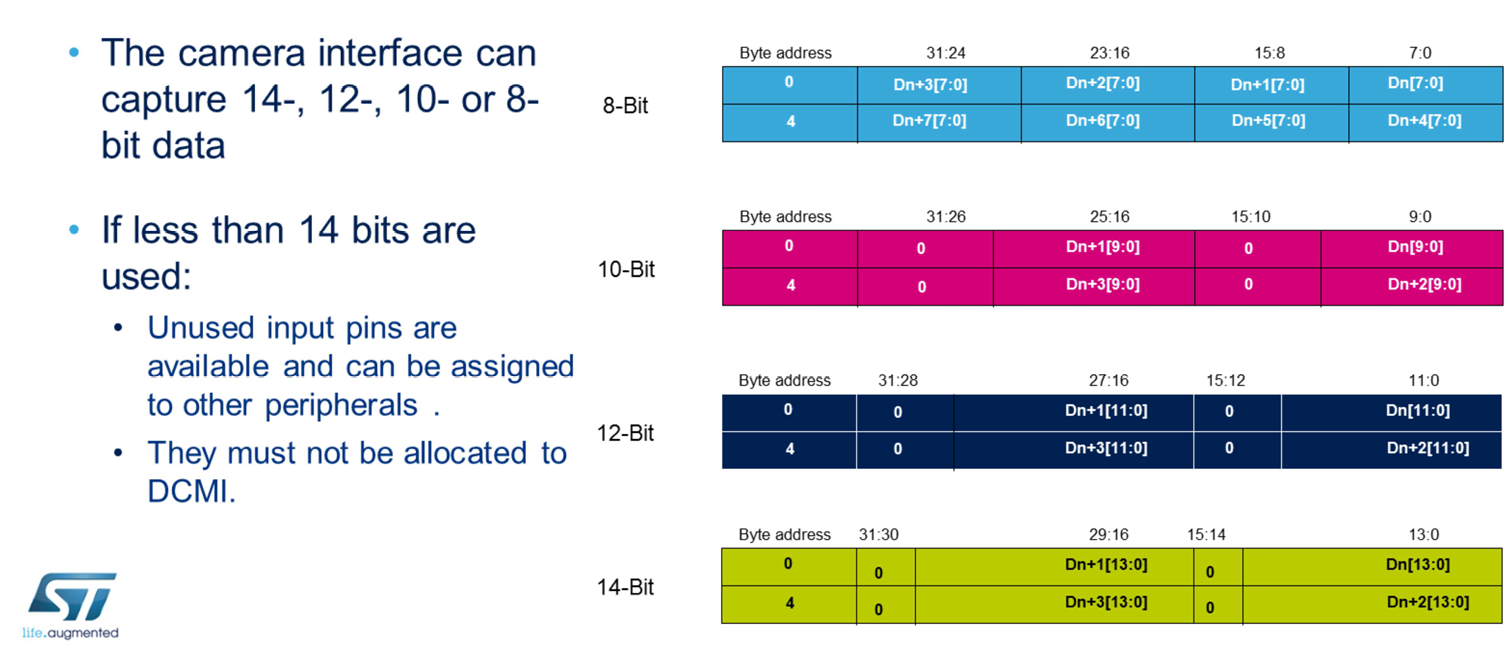
DCMI 可以选择每 2 个字节取 1 个,或者每 4 个字节取 1 个。这一功能可用于将彩色图像转换为黑白图像,或者缩小图像尺寸。在缩小图像的情况下,为了保持图像比例,DCMI 还可以只存储隔行数据,从而将垂直分辨率减半。
2.1 硬件同步
DCMI_HSYNC (LINE VALID):行同步信号,可以配置为 高电平有效 或 低电平有效。
DCMI_VSYNC (FRAME VALID):帧同步信号,可以配置为 高电平有效 或 低电平有效。
DCMI_PIXCLK :像素时钟,决定数据采样的时序。可以选择在 上升沿 或 下降沿 捕获数据。
当 VSYNC 或 HSYNC 处于“有效电平”时,表示处于 blanking 区间(即无效数据),当 VSYNC 或 HSYNC 处于“非有效电平”时,数据才是有效的。
下图为 HSYNC、VSYNC高电平有效,PIXCLK上升沿采样数据的示例: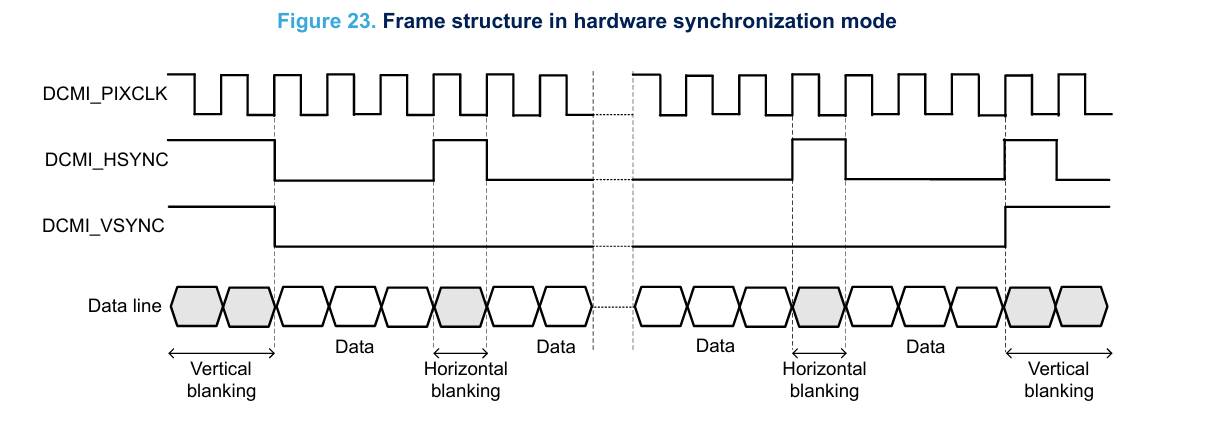
2.2 快照模式
在快照模式下,仅捕获一个帧。
通过将DCMI_CR寄存器的CAPTURE位置1使能捕获后,接口等待帧起始信号(下一个DCMI_VSYNC)。在接收到第一个完整帧后,将自动禁用DCMI(CAPTURE位自动清零)并忽略所有其他帧。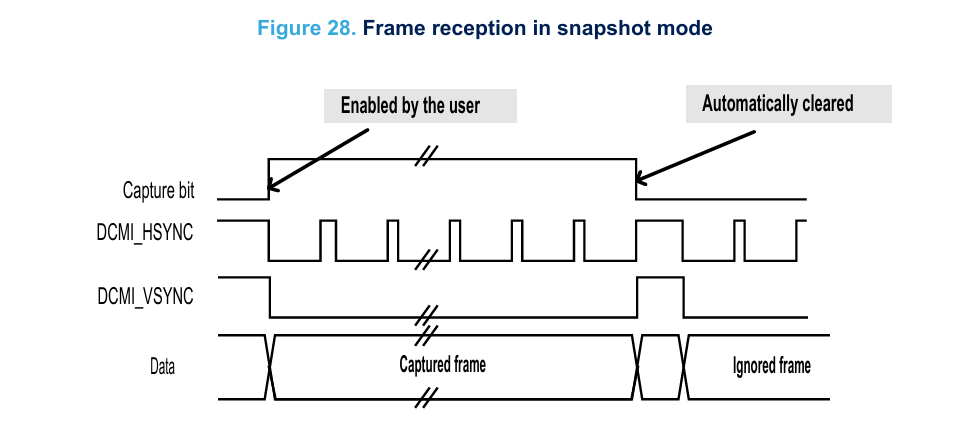
2.3 连续采集模式
选择该模式并使能捕获(CAPTURE位置位)后,接口等待帧起始信号(下一个DCMI_VSYNC),之后连续捕获数据帧。
在该模式下,可以将DCMI配置为捕获所有帧、每隔一帧捕获一帧(减少50%带宽)或每四帧捕获一帧(减少75%带宽)。
在该模式下,照相机接口不自动禁用,用户通过将CAPTURE位清零将其禁用。在被用户主动禁用后,DCMI继续抓取数据,直至当前帧结束。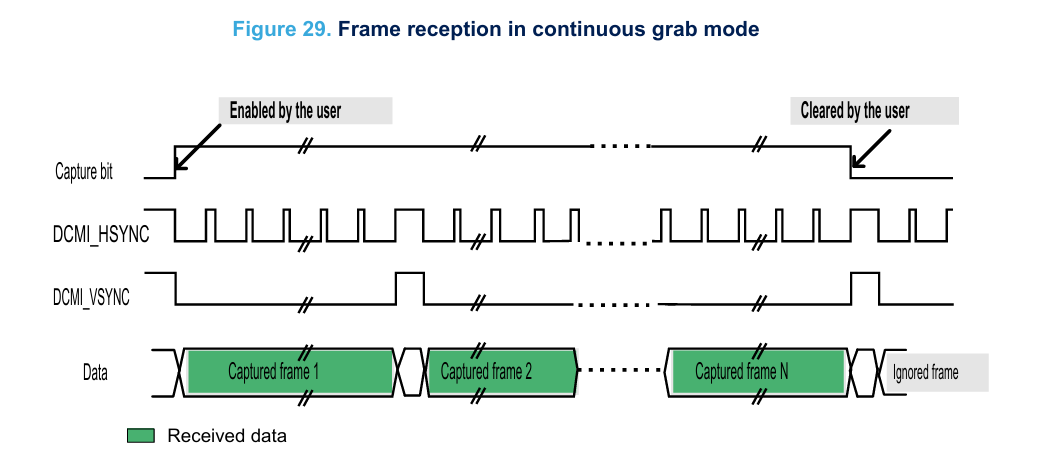
2.4 数据格式和存储
DCMI支持以下数据格式:
- 8位逐行视频:单色或原始拜尔格式
- YCbCr 4:2:2
- Y表示亮度(黑和白)
- Cb表示蓝色差色度
- Cr表示红色差色度
- RGB565
- 压缩数据(JPEG)
对于单色、RGB或YCbCr数据,最大输入大小为2048 * 2048像素。JPEG压缩数据没有大小限制。
2.5 DCMI 中断
可产生的中断类型
- IT_LINE:表示一行数据接收完成(End of Line)。
- IT_FRAME:表示一帧图像接收完成(End of Frame)。
- IT_OVR:表示数据接收溢出(Overrun)。
- IT_VSYNC:表示帧同步信号(Vertical Sync),用于检测新一帧的开始。
- IT_ERR:表示嵌入式同步码模式下的错误(Embedded Sync Error)。
中断屏蔽与全局中断
- 所有中断都可以通过软件屏蔽。
- dcmi_it:全局中断 = 各个中断的逻辑 OR。只要有一个事件发生且对应中断使能,就会触发全局 DCMI 中断。
应用程序在中断服务函数里再区分具体是哪一个事件,相关寄存器:
DCMI_IER (Interrupt Enable Register):可读写,用来使能或屏蔽某个中断。
DCMI_RIS (Raw Interrupt Status):只读,显示当前中断事件的原始状态(未屏蔽)。即使中断未使能,这里也能看到事件发生情况。
DCMI_MIS (Masked Interrupt Status) :只读,显示经过屏蔽后的中断状态。
只有在 DCMI_IER 使能的情况下,RIS 中的事件才会反映到 MIS。程序通常检查 MIS 来判断是否需要处理。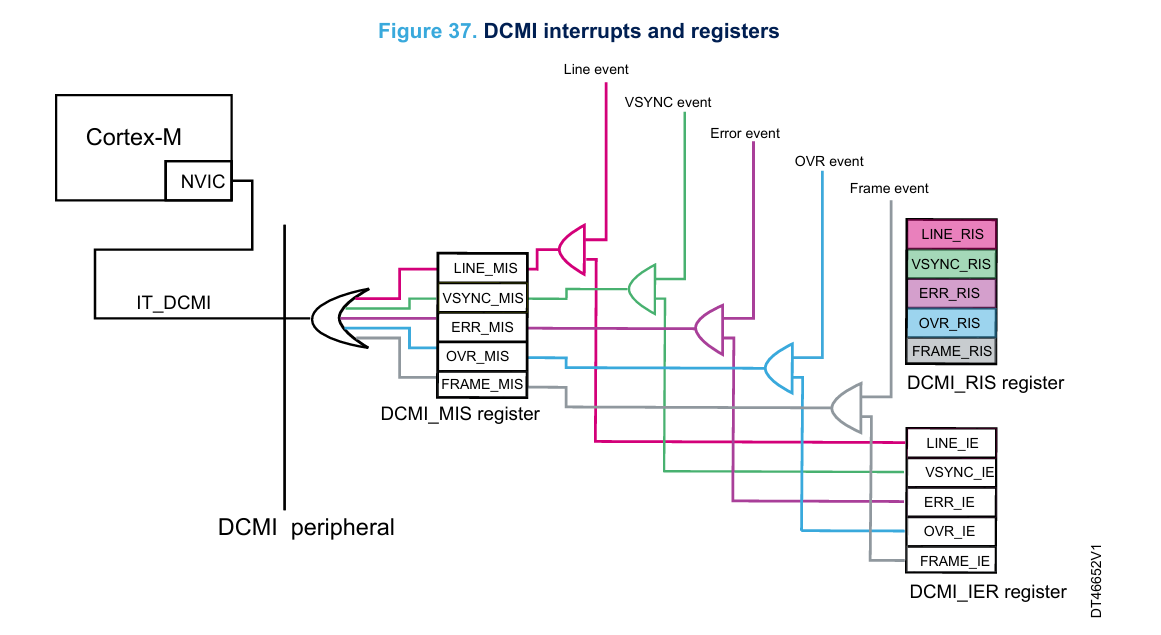
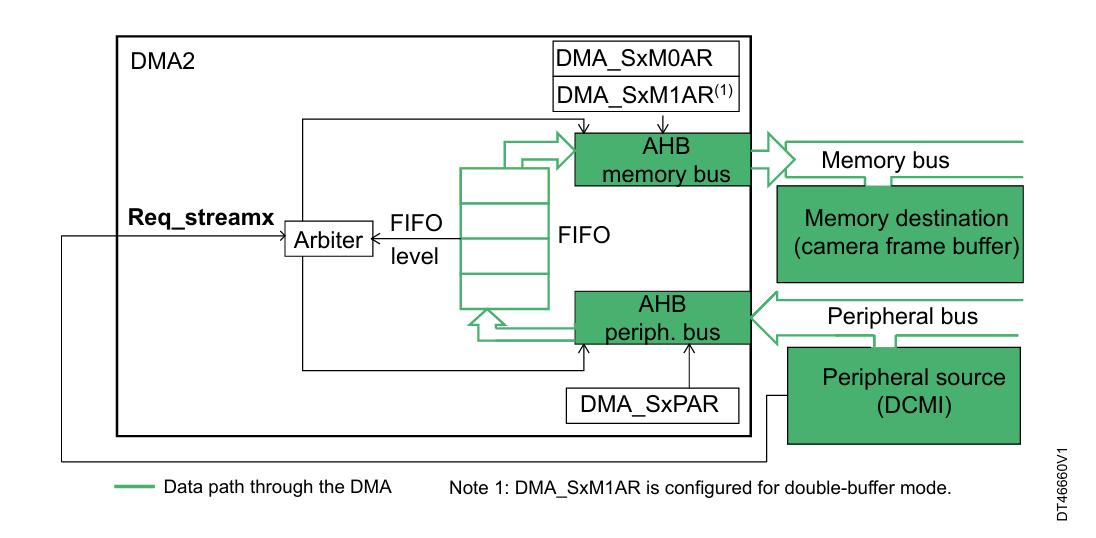
2.6 DCMI至内存传输的DMA常用配置
对于DCMI至内存的传输:
传输方向必须是外设内存,通过配置DMA_SxCR寄存器中的DIR[1:0]位来实现。在这
种情况下:- 必须在DMA_SxPAR寄存器中写入源地址(DCMI数据寄存器地址)。
- 必须在DMA_SxMAR寄存器中写入目标地址(内部SRAM或外部SRAM/SDRAM中的帧
缓冲区地址)。
为确保从DCMI数据寄存器传输数据,DMA等待DCMI生成请求。因此,必须配置相关的流
和通道。由于每次填充DCMI数据寄存器时都会生成DMA请求,从DCMI传输至DMA的数据必须具有32位宽度。因此,DMA_SxCR寄存器中PSIZE位设定的外设数据宽度必须为32位字。
DMA是流控制器:要传输的32位数据字的数量可在DMA_SxNDTR寄存器中进行软件设定,范围为1至65535。
DMA 可在以下两种模式下工作:
• 直接模式:从DCMI接收的每个字被传输到存储器帧缓冲区。
• FIFO模式:DMA使用其内部FIFO确保批量传输(多个字从DMA FIFO传输至目标存
储区)
2.7 根据图像大小和捕获模式设置DMA
必须根据图像大小(色深和分辨率)和捕获模式配置DMA:
在快照模式下:DMA必须确保一个帧(图像)从DCMI到所需存储器的传输:
- 如果以字计的图像大小不超过65535,则流可以配置为正常模式。
- 如果以字计的图像大小介于65535和131070之间,,则流可以配置为双缓冲区模
式。 - 如果以字计的图像大小超过131070,则需要软件介入,根据信号交替修改DMA_SxM0AR/DMA_SxM1AR 的值,来动态修改目标内存帧缓存地址,以实现存储高分辨率的图像帧数据。
在连续模式下:DMA必须确保连续多个帧(图像)从DCMI到所需存储器的传输。每次DMA
完成一帧的传输时,将开始下一帧的传输:- 如果以字计的图像大小不超过65535,则流可以配置为循环模式。
- 如果以字计的图像大小介于65535和131070之间,则流可以配置为循环模式+双缓冲区模式。
- 如果以字计的图像大小超过131070,则需要软件介入,根据信号交替修改DMA_SxM0AR/DMA_SxM1AR 的值,来动态修改目标内存帧缓存地址,以实现存储高分辨率的图像帧数据。
3 stm32使用OV5640 进行图像采集
为了让 OV5640 能正常工作,主要涉及以下几个核心配置:
- OV5640 摄像头像素时钟配置,和帧率控制
- HSYNC、VSYNC、PCLK 的极性配置
- 输出尺寸和像素格式配置
这里,使用stm32h747 DCMI 8bit并行接口连接OV5640,因此需要设置 OV5640 的 0x300e 寄存器使用 digital video port (DVP) 并行输出模式。
3.1 OV5640 摄像头像素时钟配置,和帧率控制
网上能找到的ov5640手册中,信息不完备。关于ov5640 的时钟配置,这里主要是基于网上资料,以及手动实验。ov5640 的内部时钟框图系统,网上找到的一个图显示如下: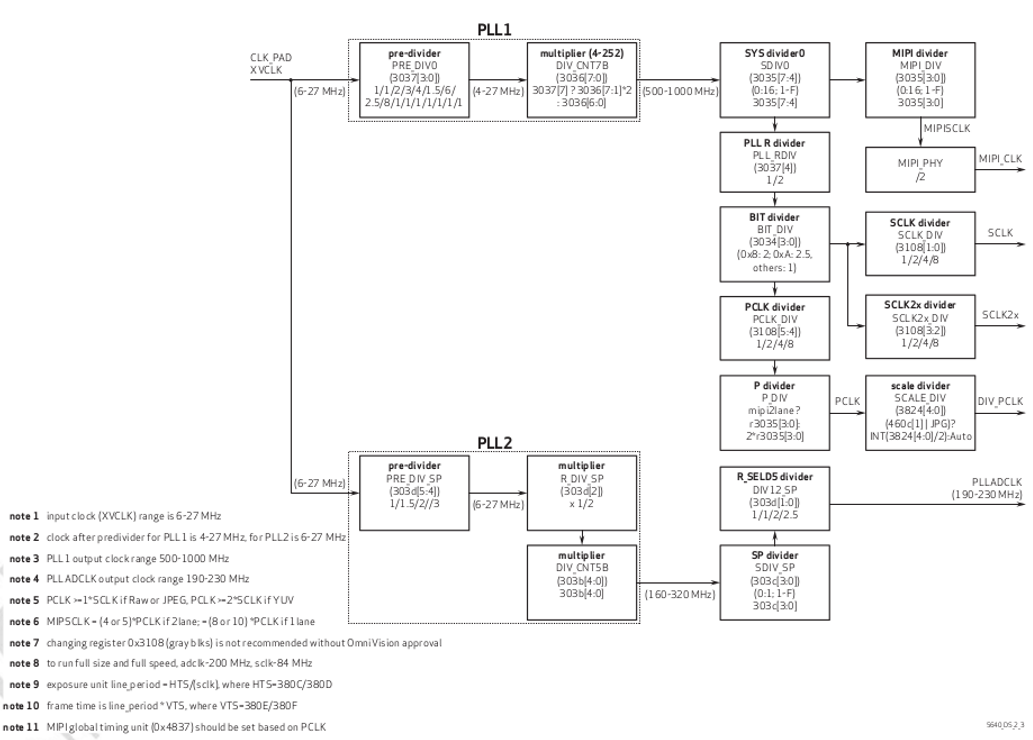
根据上图,以及实验测试,与像素输出时钟PCLK 相关的主要为以下几个寄存器:
- 0x3034 (bit[3:0]的值为8-》2分频; 值为A-》2.5分频; 其它值-》1分频)
- 0x3035 (bit[7:4]的值为DVP模式分频系数,bit[3:0]应该是针对MIPI模式的分频系数,实测修改该值帧率不变或直接导致摄像头输出异常)
- 0x3036 (值作为倍频系数)
- 0x3037 (bit[4]:值为0不分频,值为1二分频,bit[3:0]值为分频系数)
- 0x3108 (bit [5:4]分频值, 本地实测这个值需要保持0不分频,修改值让其分频会异常,可能与一些其它参数存在限制约束)
输出帧率 :fps = pclk / (VTS * HTS )
- HTS 由0x380C、x380D 寄存器设置。
- VTS 由0x380E、x380F 寄存器设置。
示例:
1 | {0x3034, 0x18}, |
修改帧率时,有限通过修改 倍频/分频 寄存器来改变帧率。VTS、HTS应该和其它寄存器有一些关联约束,随意修改容易导致摄像头没有输出内容。
3.2 HSYNC、VSYNC、PCLK 的极性配置
OV5640会输出 HSYNC、VSYNC、PCLK信号,Stm32 DCMI会根据 PCLK 的边沿进行采样,也需要根据配置的 HSYNC、VSYNC 信号的极性来识别行/列消隐(即那些无效数据)。
在 OV5640 手册中,0x4740 寄存器描述了对应信号的极性:这里没有实际描述对应信号的 “active” 是表示数据有效还是无效。
- Bit[5]: PCLK polarity
- 0: Active low
- 1: Active high
- Bit[1]: HREF polarity
- 0: Active low
- 1: Active high
- Bit[0]: VSYNC polarity
- 0: Active low
- 1: Active high
在 stm32h7 中,DCMI 的 DCMI_CR 中 :明确描述了这两位表示数据无效时的极性
- Bit 7 VSPOL: Vertical synchronization polarity
This bit indicates the level on the DCMI_VSYNC pin when the data are not valid on the parallel interface.- 0: DCMI_VSYNC active low
- 1: DCMI_VSYNC active high
- Bit 6 HSPOL: Horizontal synchronization polarity
This bit indicates the level on the DCMI_HSYNC pin when the data are not valid on the parallel interface.- 0: DCMI_HSYNC active low
- 1: DCMI_HSYNC active high
例如:
配置 OV5640 的 0x4740 值为 0x23时。实际根据当前 PCLK 周期,以及设置的输出尺寸和像素格式,用示波器观察,发现:实际配置 0x4740 = 23 时,数据有效时 OV5640 输出的 VSYNC 信号的极性是高电平,而HREF(HSYNC)极性是低电平。 因此,对应的 stm32 DCMI_CR 需要配置为: VSPOL = 0,HSPOL = 1
同样
- ov5640 的 0x4740 值为 0x22时。 stm32 的 DCMI_CR 需要配置为: VSPOL = 1,HSPOL = 1
- ov5640 的 0x4740 值为 0x20时。 stm32 的 DCMI_CR 需要配置为: VSPOL = 1,HSPOL = 0
3.3 输出尺寸和像素格式配置
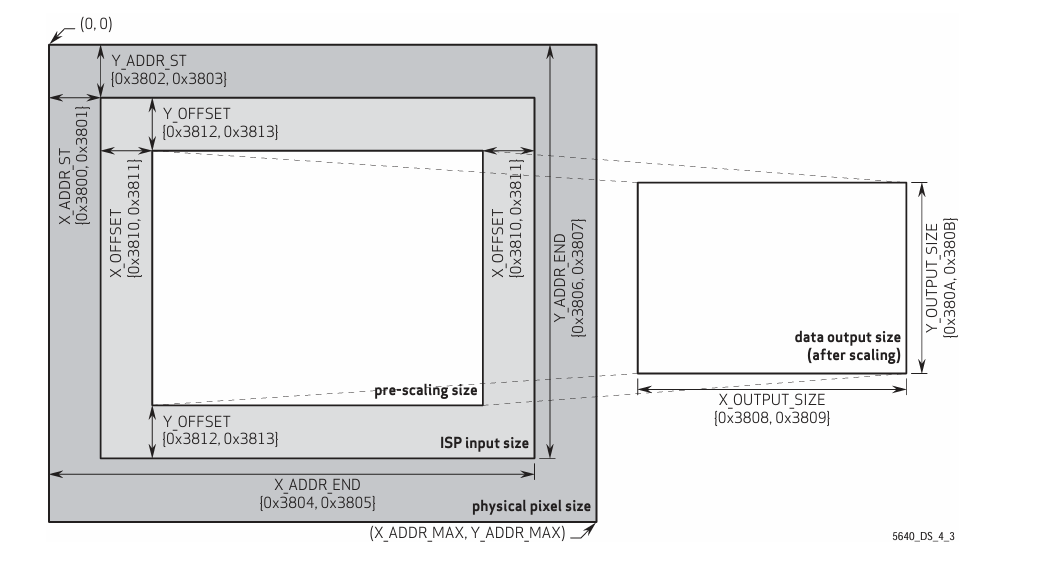
上图为 OV5640 手册中的介绍。
pre-scalling size 即为摄像头内部图像处理器ISP输出的尺寸,经过缩放后,输出期望获取的图像尺寸(通过0x3808 - 0x380B 寄存器设置)。
0v5640 输出的像素格式,通过 0x4300 寄存器设置。
这里设置的为:0x6f
- 其中 高四位值 6表示 RGB565 模式
- 低四位值 0xF ,表示输出序列为: first:{g[2:0],b[4:0]}, second: {r[4:0],g[5:3]}
这么设置是当前实例中,会使用 stm32h7 的 DMA2D 对摄像头输出进行格式变化。而 DMA2D 对于 RGB565 模式的输入内容,在内存中的格式要求为:
- @ + 0: G0[2:0]B0[4:0]
- @ + 1: R0[4:0]G0[5:3]
- @ + 2: G1[2:0]B1[4:0]
- @ + 3: R1[4:0]G1[5:3]
参考
[1] stm32h747-DCMI
[2] AN052
[3] OV5640摄像头的时钟配置
[4] STM32H7xx Reference Manual, RM0399