infineon AURIX-TC3xx——mcmcan笔记
mcmcan视频笔记,视频来源:https://videos.infineon-autoeco.com/pc/page/detail/1429
CAN History
- Bosch Can V2.0 (1991)
- 2.0A;”Standard CAN” with 11 bit message ID
- 2.0B;”extended CAN” with 29 bit message ID
- 接受为 ISO11898-1 标准(2003)
- ISO11898-1:数据链路层标准
- ISO11898-2: 物理层标准(收发器)
- TTCAN(2000) 时间触发的CAN传输(预先定义好了CAN的收发时间)
- CAN FD(2012)
- 2014 年正式被划入ISO11898-1
- “no ISO CAN FD”(博世标准)和 ISO CAN FD
- CRC域不同,ISO11898-1::2015 中体现
infineon CAN
 )
)
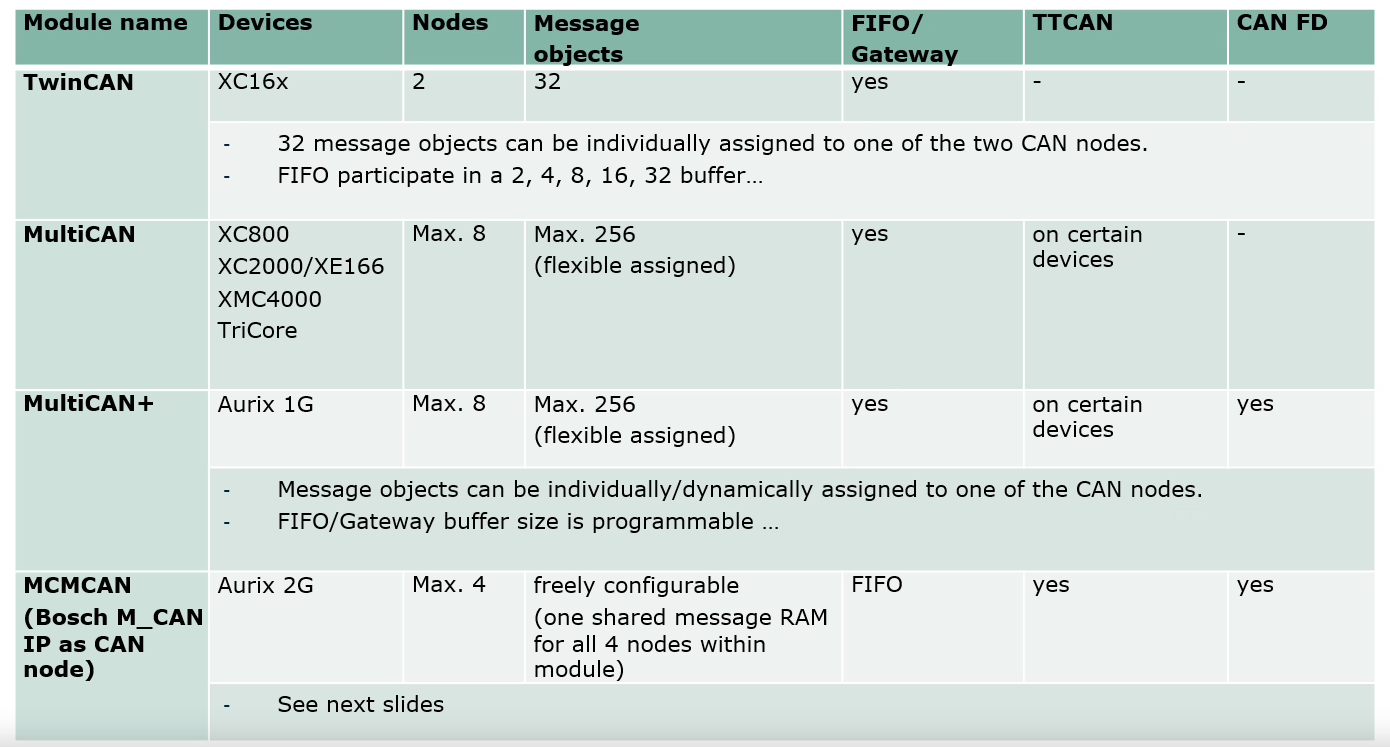
MCMCAN:new can module for Aurix2G
each MEMCAN unit contains:
- 包含 4 个 node
- 支持debug over can
- 支持最多16个中断(分配了16个SRN,该模块上的所有Node共享这16个中断)
- 支持接收filter,以列表的形式存放在message ram中
- 支持 range filter
- 支持 发送历史列表,包含发送数据的时间戳,ID
- 支持 loop back 模式
- 同一个MEMCAN上的 can node共享一个可配置的 Message Ram
- 接收处理:rx handler,对接收遍历filter,后存放到rx fifo
- 发送处理:tx handler,将MSG ram中数据发送出去,具有比较功能,发送优先级最高的can frame
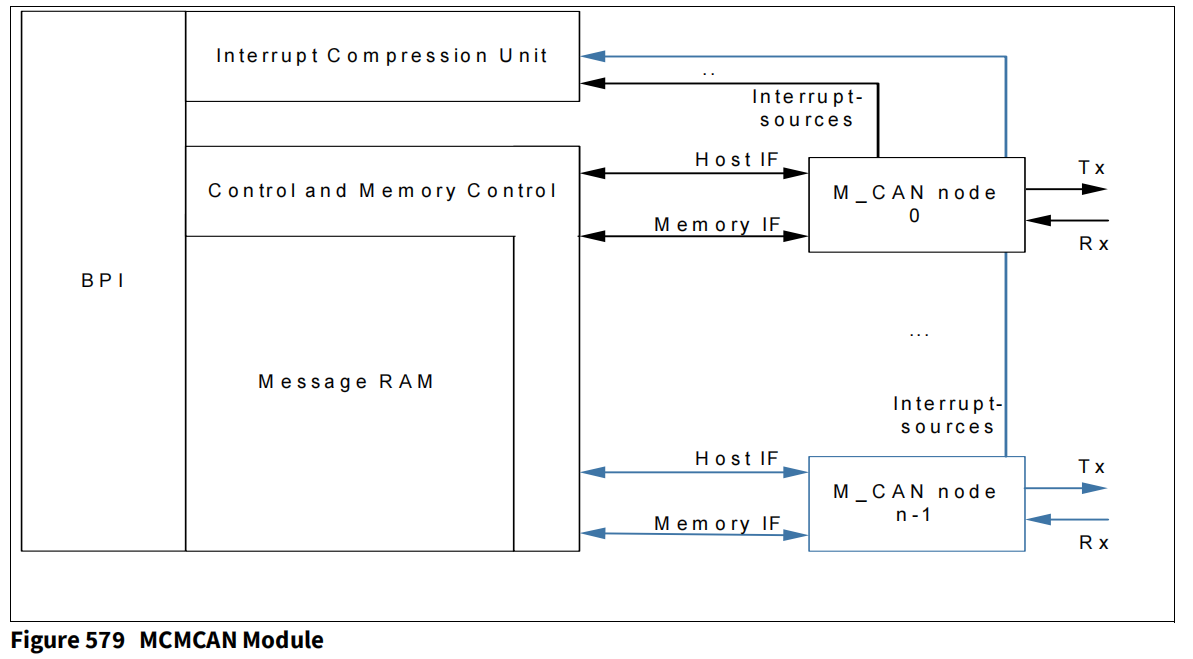
MCMCAN Overview:
- Interrupt Compression Unit:将中断信号压缩成16个
- clock Control and memory control (全局控制——影响该module上的所有node)
- message ram:节点共享的ram
- BPI:访问保护
- can的复位也是全局控制,影响该module上的所有node
MEMCAN:message ram
MEMCAN:Clock
模块时钟开/关通过CLC寄存器控制
时钟选择通过MCR.CLKSEL控制
- 模块内部控制使用的时钟fsyn(最大100M):driven by f_mcanh
- 生成波特率的时钟fasyn:seletct from
- fmcan:the peripheral clock(20,40,80M)
- fosco: the oscillator input clock
MEMCAN:Port
MEMCAN:interrupt
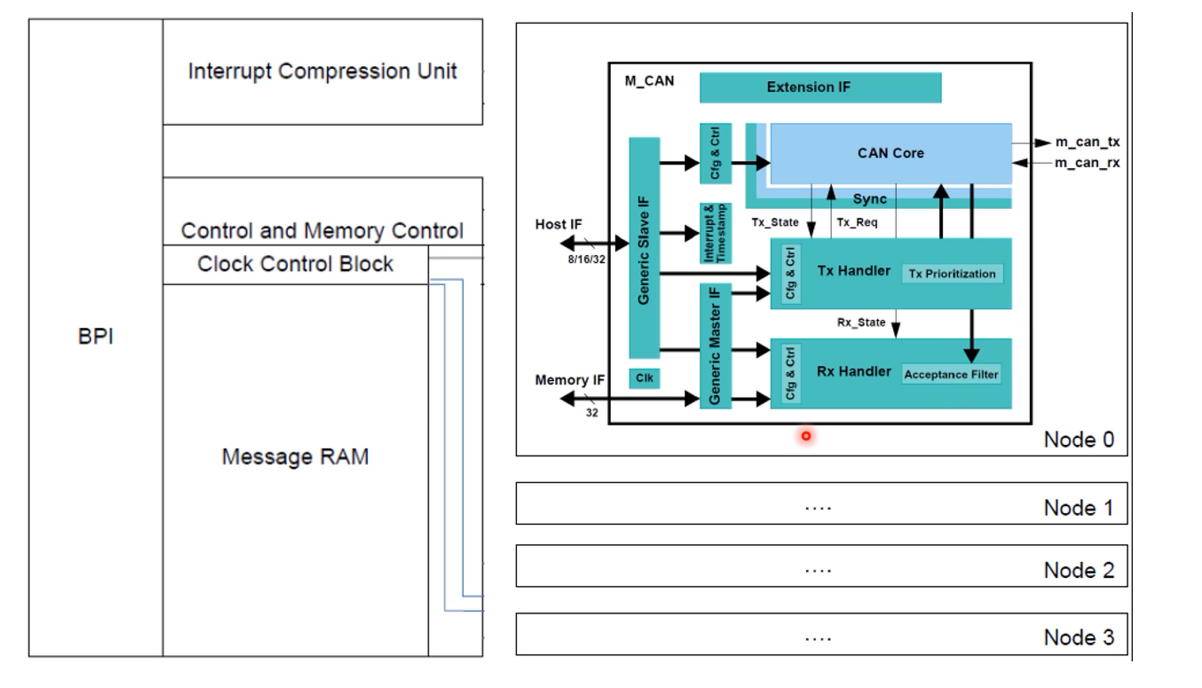
MEMCAN:Node
can node M_CAN overview:
- can core (11898-1)
- 时钟和同步控制单元
- CAN协议相关配置(bit时序,错误计数等)
- 中断压缩和使能单元
- 对 message ram进行配置和分割
- Tx Handler:
- 控制数据从 message ram传输到 CAN core上
- 消息优先级
- 取消传输
- Rx Handler:
- 控制数据从 can core传输到message ram中
- 将接收数据保存在不同ram区域中。
- 保存额外信息(如时间戳)
Node Bit Timing
- the data bit rate(CAN FD,仲裁域使用下面的nominal bit rate,数据域使用 data bit rate)
- ISO 要求的每一位时间为 5-25 Tq
- Tq = (1+DBRP)/f_can
- bit timing = (1+(DTSEG1+1) + (DTSEG2+1))*Tq (DBTP寄存器中配置)
- the nominal bit rate
- ISO 要求每一位时间为 8-80Tq
- Tq = (1+NBRP)/f_can
- bit timing = (1+(NTSEG1+1) + (NTSEG2+1))*Tq (NBTP寄存器中配置)
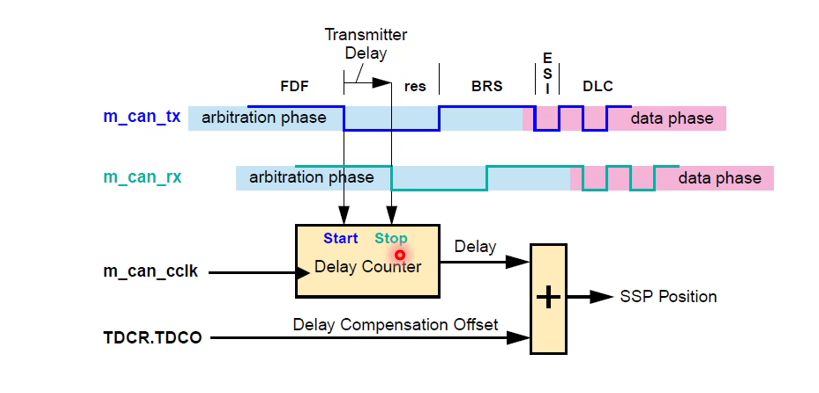
传输延迟补偿:
can中一个位的传输可以分为三个阶段:Tsync,Tseg1 以及 Tseg2。一般采样点会在Tseg1 和 Tseg2 之间:![]()
CAN在传输数据时,会同时监听总线上的数据,以判断是否一致。这里的发送和接收数据之间存在一定延迟,因此需要进行补偿(否则可能导致采样点错误):
- 硬件上会自动对第一个下降沿的延迟进行补偿
- 可以通过寄存器TDCR.TDCO 叠加额外的补偿
Tx Handler:
- 发送 tx buffer中的数据 (message ram ——> can core)
- 每个 can node 支持最大32个 tx buffer
- 硬件自动处理 putindex/getindex (FIFO/QUEUE mode)
- 控制发送优先级
- 可以取消发送
- 三种发送模式
- dedicated mode:
- 专用 tx buffer,用于在CPU的完全控制下进行消息传输。
- 数据更新后,需要设置TXBARi.ARx进行发送
- fifo mode:(按软件写入顺序发送)
- can core实际发送从TXFQSi.TFGI(getindex)指向的element开始
- 软件写入数据从TXFQSi.TFQPI(putindex)指向的element开始
- 要发送的element需要设置TXBARi.ARx中的对应位(根据putindex获得)
- queue mode:(内部发送按ID小的先发送)
- can core发送时根据ID优先级发送(越小优先级越高,优先级相同则buffer number小的优先级高)
- 软件写入数据从TXFQSi.TFQPI(putindex)指向的element开始
- 要发送的element需要设置TXBARi.ARx中的对应位(根据putindex获得)
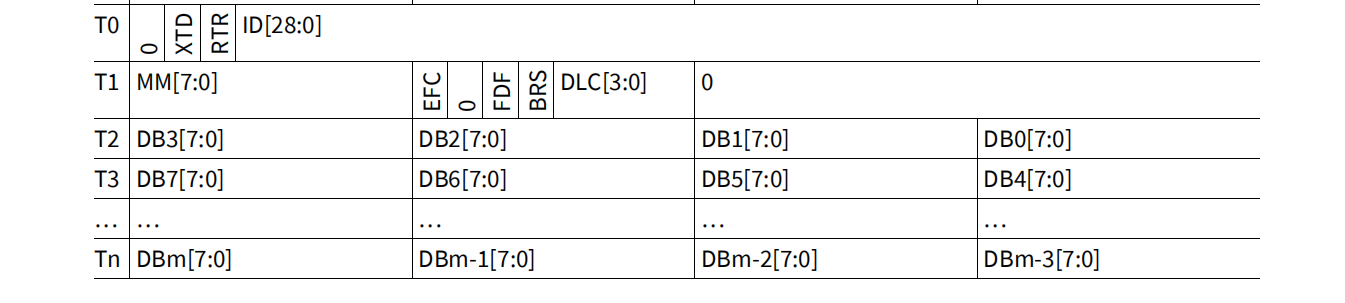
- tx buffer在message ram 中的布局如下图:data size 由 TXES.TBDS 设置
- dedicated mode:
发送优先级:
- dedicated tx buffer:id 最小的先发送
- tx fifo:先进来的先发送
- tx queue: id最小的先发送
- dedicated tx buffer + tx fifo: dedicated txbuffer中的所有element和fifo中最旧的element,它们中id 最小的先发送
- dedicated tx buffer + tx queue:所有element中id最小的先发送
Rx Handler:
- 每个 can node具有 RxFIFO0, RxFIFO1, dedicated rxbuffer
- 每个 can node支持 2 个filter sets: for 11/29 bit ID (filter指明是否接收数据,以及接收数据放在哪里——fifo0/1 or dedicated rxbuffer)
- putindex 由硬件接收数据后自动更新
- getindex 需要软件在提取数据后,设置RXF0Ai/RXF1Ai中的FOAI
数据在 message ram中布局: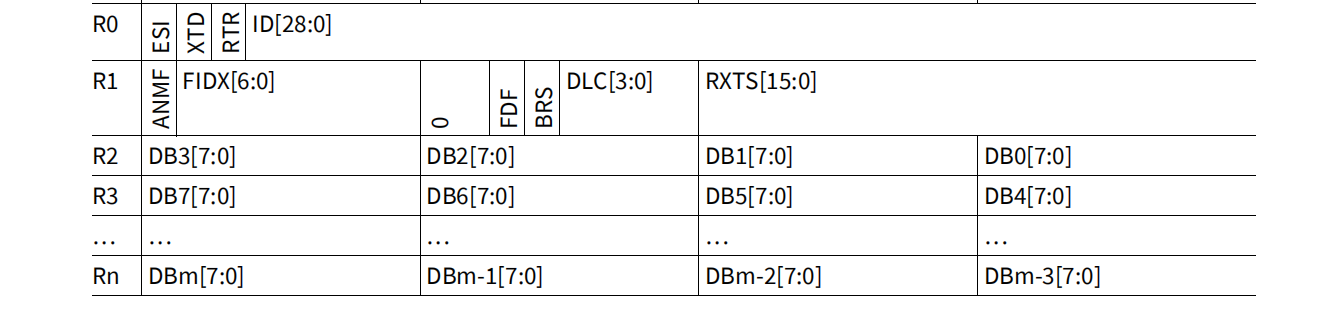
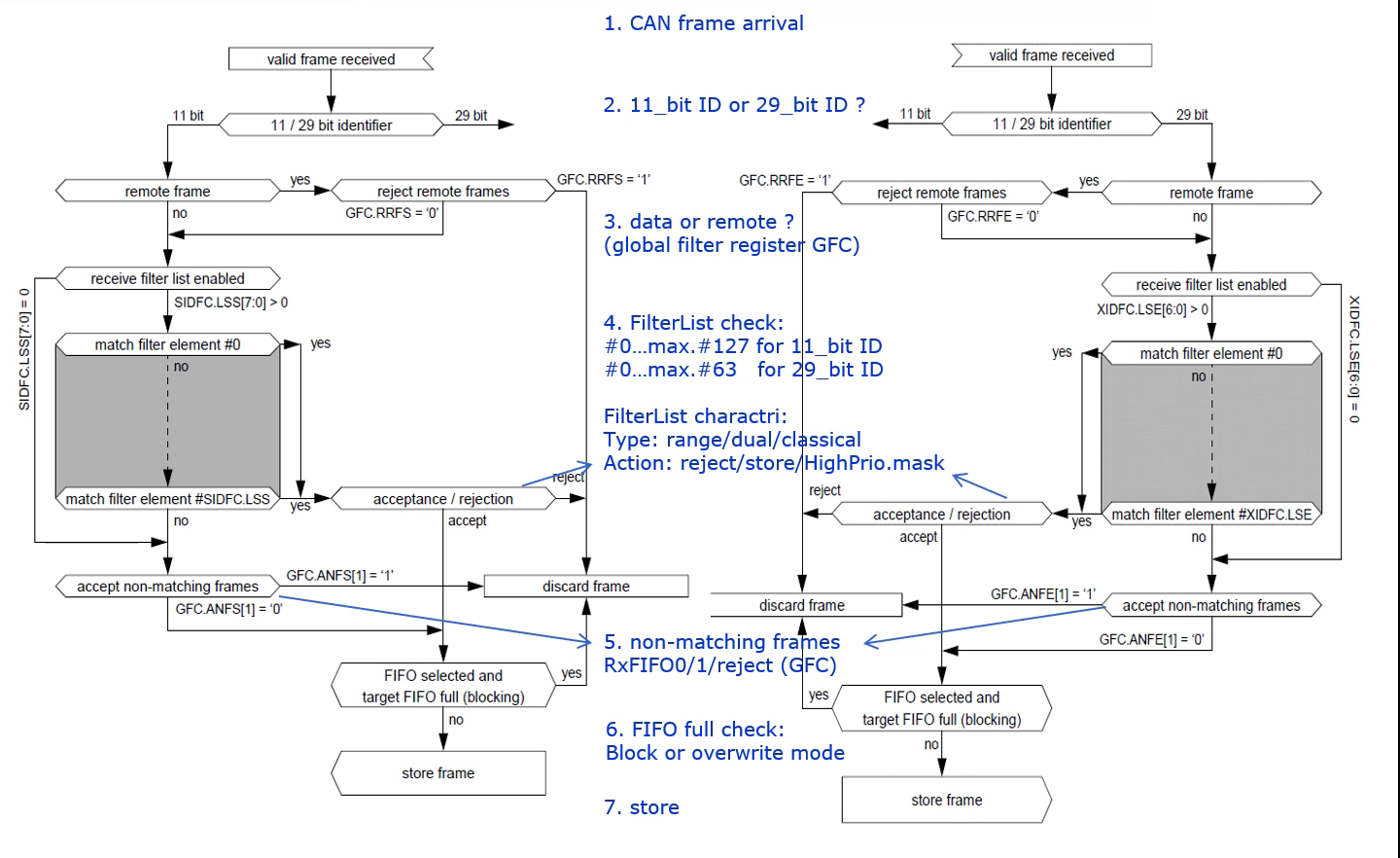
Rx Filtering:
- 每个can node支持 2 个过滤集合(for 11位id/29位id)
- 11bit id帧,可以配置最多128个 filter
- 29bit id帧,可以配置最多64个 filter
- 每个can node还有一个 global filter register:
- 没有匹配的 can frame是否接收
- 接收/拒绝 11/29 位的 remote frame
- 支持range 匹配,SFID1/SFID2任意一个匹配过滤,mask+id的匹配
- 过滤处理流程: