实现一个精简的BLE从机协议栈—1—基础概念和硬件驱动实现
- 本系列文章,基于
nordic nrf52840MCU,来实现一个精简的 BLE 从机协议栈。 - 已经实现的协议栈地址:https://github.com/fengxun2017/dh_ble/tree/dev,目前在dev分支进行更新开发。早期是基于
nrf51822实现了BLE 4.0规范中从机协议栈中的必要部分,实现了可以和手机连接并传输数据。目前手上只有nrf52840了,当前基于nrf52840实现底层需要的驱动,并通过该系列文章,逐步修改一些上层不合理的地方。 - 该系列文章,涉及到的协议部分会基于
BLE 5.3规范进行描述,但仍旧只实现最简单、必要的部分(能连上手机,进行通信即可),并基于iphone进行测试。因此,android可能会由于发送一些我没实现的指令,出现兼容性问题。并且由于没有充分的错误场景测试,一些实现本身可能存在缺陷。 - 本系列文章,只是用来作为学习 BLE 协议的参考,从硬件层驱动,链路层,到上层协议,都以最直接,简单的方式来实现。
1——BLE广播和连接基本概述
BLE的普通广播(可连接、可扫描),其工作形式如下图所示: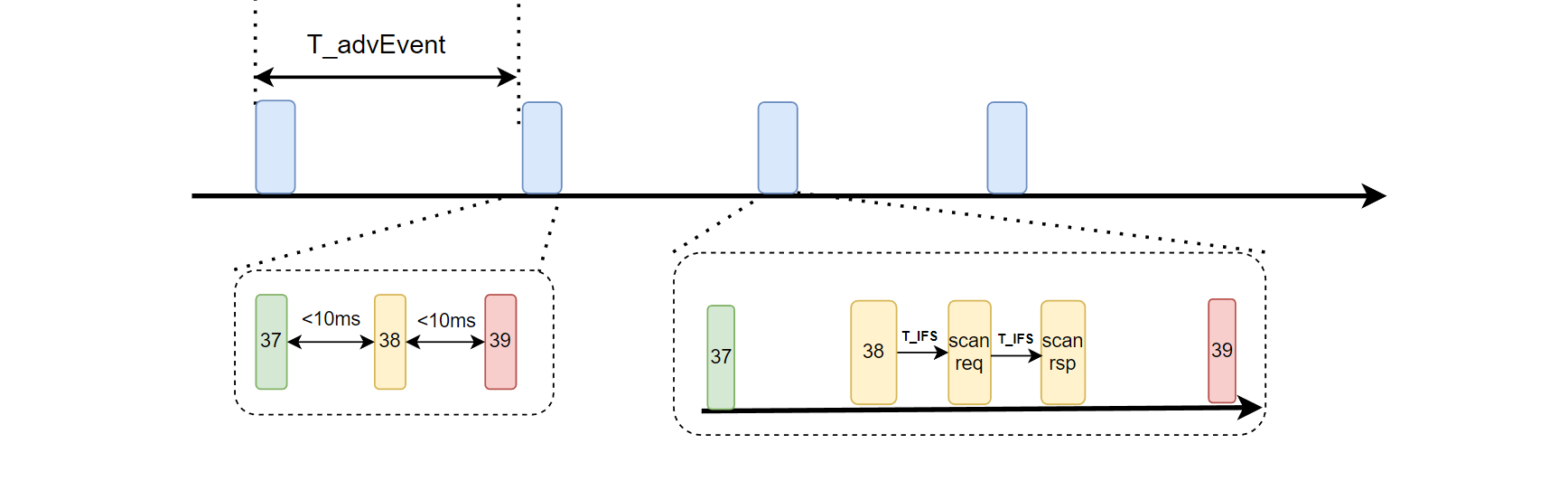
广播启动后,设备会周期性的进行广播。每次广播事件,设备会在37,38,39三个信道上,将广播数据广播一次(如上图左下所示),规范要求三个信道的广播数据发出间隔要小于10ms。
并且,每个信道发送完数据后,需要持续监听一个很短的时间(规范定义为T_IFS=150us),看是否有其它设备(扫描者,例如手机)发送了扫描请求(或连接请求)。
如上图右下所示,设备在37信道广播后,没有监听到数据。之后开始在38信道上广播,广播完后监听到了扫描方发送的扫描请求,设备回复扫描相应。之后,设备继续在39信道上广播。
上图中 T_advEvent可以看做是广播间隔,它的实际值是:T_advEvent = advInterval + advDelayadvDelay是一个0-10ms的随机值。为什么要有这个随机值? 因为范围内可能存在很多个设备都在广播,如果两个设备刚好同时启动,刚好广播周期又是一致,那么它们的物理信道就会一直冲突(同时使用同一个物理信道)。
通过引入的这个随机延迟advDelay,可以极大缓解物理信道冲突问题。
了解了广播的基本机制,再来看下BLE连接后的基本通讯模式: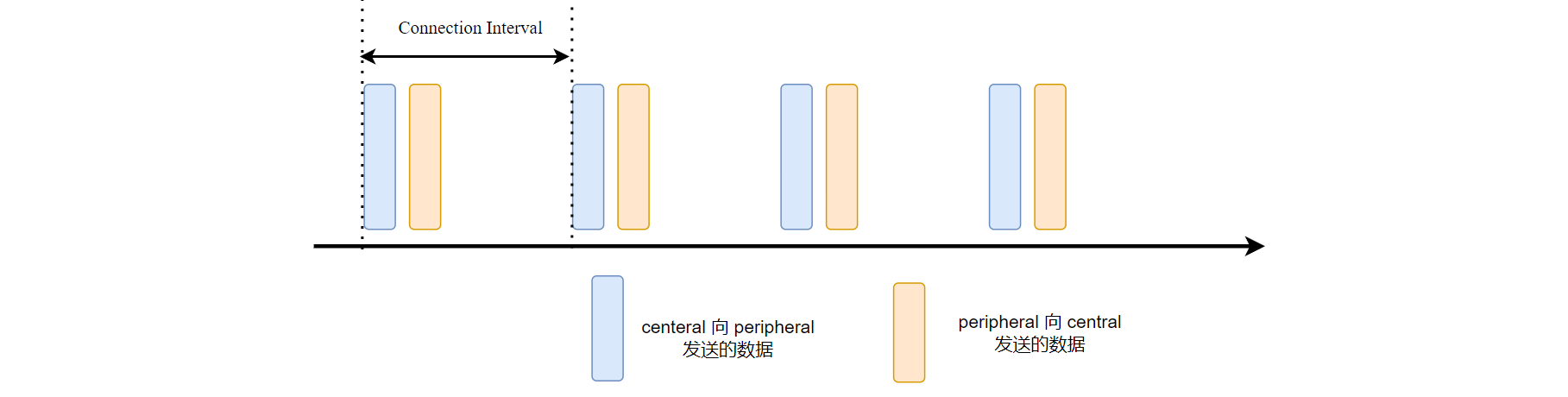
连接建立后,central(发起连接的设备)和 peripheral(被连接设备)会周期性(以连接间隔为周期)的进行数据交互。(上图每次central和peripheral只交互了一次数据,实际是可以交互多包数据的)
从上图可以发现,BLE 的每次数据交互都是由central先发起的,peripheral收到central数据包后再回复自己的数据包。连接建立以后,central和peripheral会按照这个模式周期性的交互,即使我们没有数据需要发送,central和peripheral也会周期交互空包,这是为了维持连接,保持它们的同步关系。
无论是广播状态,还是连接状态。BLE的通讯模式都是“周期性”的。这也是BLE为什么低功耗的原因,对于 1 秒需要交互一次数据,每次只交互几十字节数据的设备来说。1秒钟的时间内,只有几百us的时间是处于工作作态的,其它时间设备都可以处于休眠状态,因此整体功耗可以做到非常低。
2——实现中的一些细节问题
了解了BLE广播/连接状态下的基本情况,如何来实现它?
2.4G Radio是必备的,它是数据收发的载体。
其次,我们需要一个定时器,来实现周期广播,以及连接后的周期交互。
利用定时器,可以实现周期性的唤醒设备,进行数据收发。
设备大部分可以处于休眠状态,当交互周期到达时(定时器超时),唤醒设备,进行数据收发。之后再次进入休眠状态,等待下一次定时器超时。
例如,对于peripheral设备来说,只需要在每次连接间隔(connection interval)到期时,唤醒设备并开始监听central发送过来的数据,如下图所示: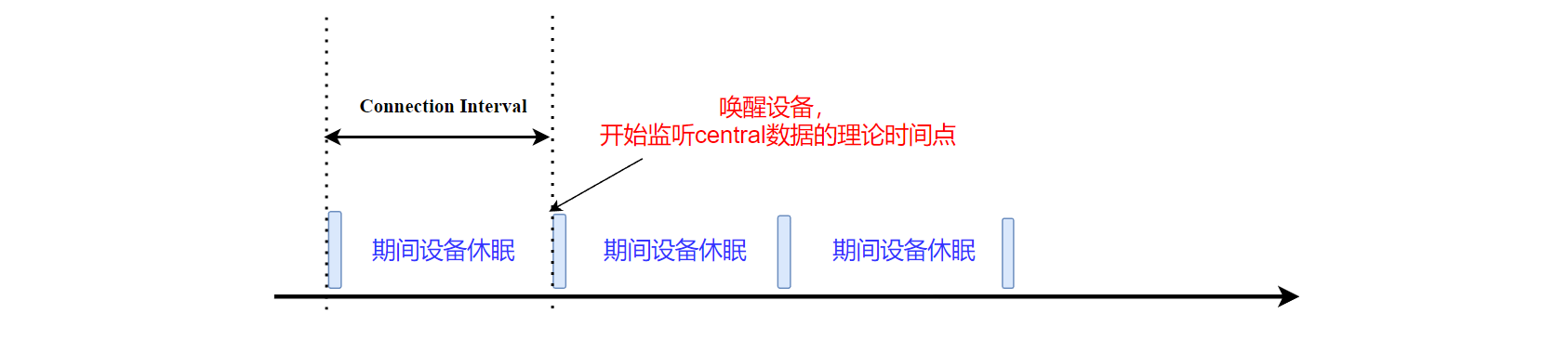
但现实中存在问题是,定时器都是有误差的。例如,用来实现周期唤醒设备的 RTC定时器,在其时钟精度为100ppm的条件下,1秒钟的定时,会存在 ±100us 的误差。
因此,对于peripheral设备,连接间隔 1秒 的情况下,我们不能刚好在 第1秒 这个理论时间点(假设0秒是第一次交互)才唤醒设备,让其监听(central)数据,而是需要考虑定时器误差问题,并根据这个误差提前唤醒设备,或监听额外的时间。
并且,这个误差需要考虑连接双方误差的总和,即实际误差应该是 central的误差 + peripheral的误差(这是最大误差,发送在两个设备的时间误差方向相反时)。对于 1秒 连接间隔,在central/peripheral 时钟误差都为100ppm的条件下,整体误差最大为1000000us *(100+100)/1000000 = ±200us。
这种情况下,在实现peripheral的链路层时,需要在理论唤醒时间点(anchor point)之前200us就唤醒设备,如果一直没监听到数据,也需要持续监听直到理论时间点之后200us的时间(即额外监听时间),如下图所示: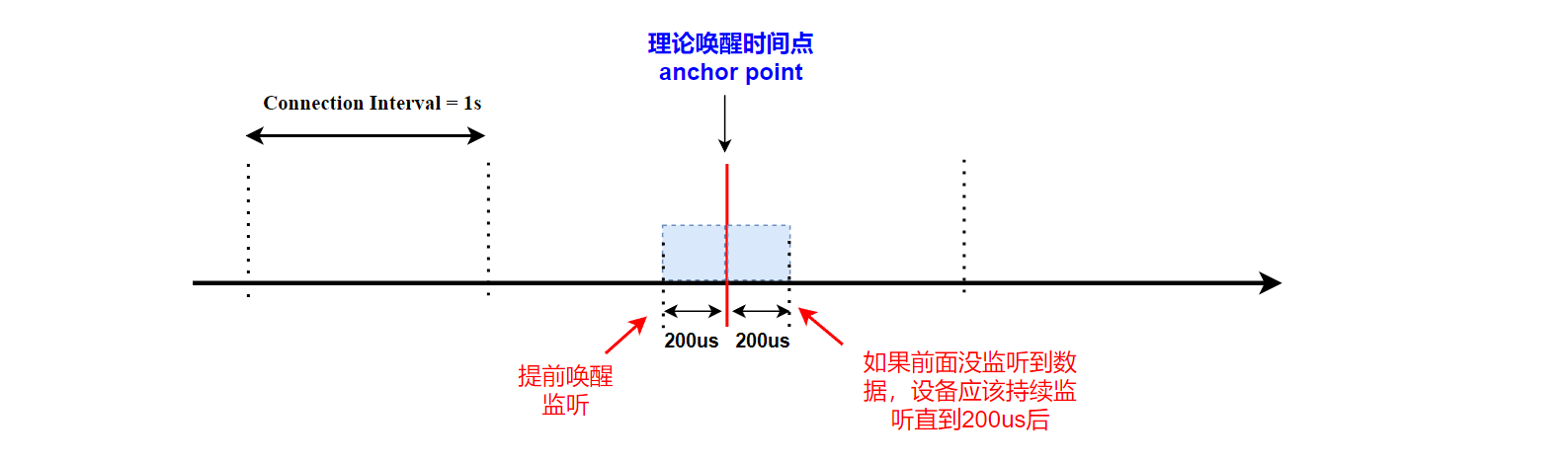
PS:这也是规范中的连接请求CONNECT_IND为什么会有SCA参数(Sleep clock accuracy),因为peripheral需要知道central的时钟误差,并结合自己的时钟误差,从而得到可能的最大误差。这个额外的监听时间就是规范中的window widening
理论唤醒的时间点,协议规范称为anchor point,如上图所示。
由于上述时钟误差的原因,peripheral是无法准确知道这个anchor point实际发生时间点(即central发送的数据包的到达时间)。所以peripheral在每次连接事件中收到central的数据包,都可以看做是一次重新同步,并更新下一次唤醒的理论时间点。其逻辑如下图所示: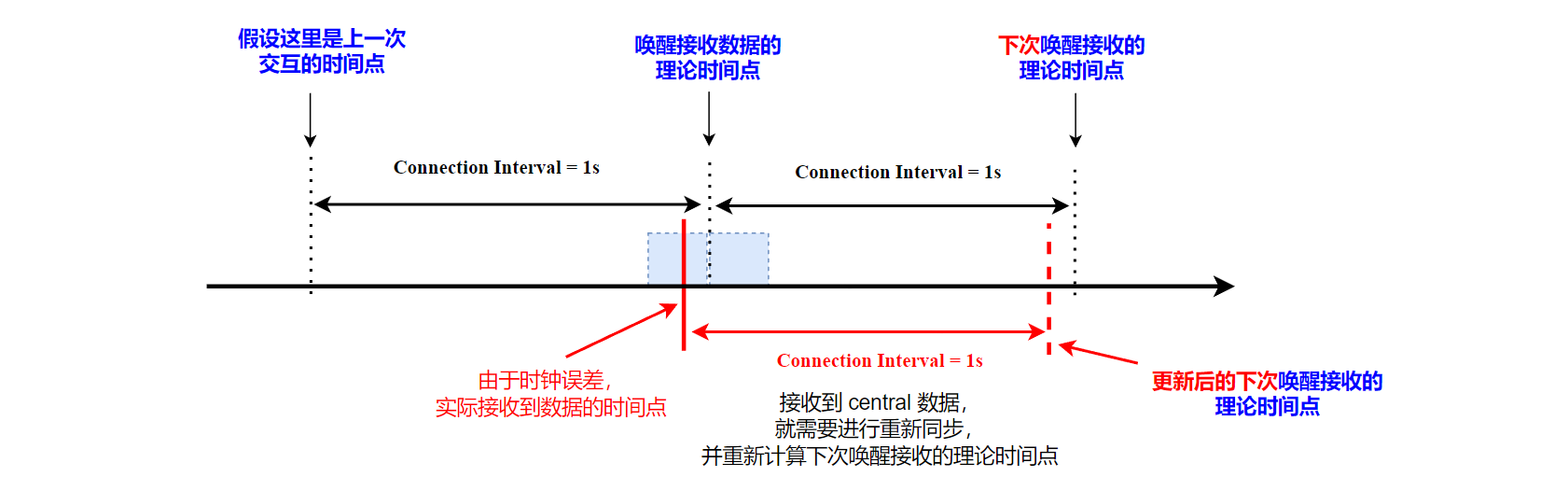
因此,实际实现定时器周期唤醒时,我们使用的是单次定时,每次收到数据包后,再启动下一次连接事件的定时。
3——nrf52840 硬件准备
基于前文所述,我们需要使用 nrf52840 的 radio外设,作为数据收发载体。
需要注意的是,nrf52840 的 radio 是由高频时钟(HFCLK)驱动的,对高频时钟的精度有要求(否则信号频率不准),因此需要使用外部晶振作为高频时钟输入源,来提供较为精确的HFCLK。在源码文件nrf52840/NrfClockDrv.c中实现了HFCLK配置输入源为外部晶振。
此外,我们还使用了 RTC 硬件定时器,来实现周期广播,以及连接后的周期交互。基于前文第二节所述,在源码文件nrf52840/NrfRtcDrv.c的实现中,我们实现的是单次 RTC定时器(每次超时中断发生后,在中断里关闭超时事件)。
需要注意,RTC 的驱动源来自 MCU 内部的低频时钟(LFCLK——32768 HZ),低频时钟的输入源可以是外部晶振,也可以是内部RC 振荡器产生,源码文件nrf52840/NrfClockDrv.c中启动LFCLK时可以配置。
我的开发板上没有外部晶振,因此配置的使用内部 RC 振荡器作为输入源。
RC 振荡器作为输入源,会使得LFCK的精度比较低,进而导致RTC定时器精度低,不适合用来作为协议栈的时序同步时钟。因此需要对RC 振荡器进行周期校准,这部分功能实现在nrf52840/NrfClockDrv.c中。 一般1s 校准一次就可以了。
PS: 自测结果,rc 振荡器作为LFCLK输入源,无校准时1s定时器误差在8ms, 有校准时(每秒校准一次)误差在100us以内。 所以是否校准影响很大。因为BLE 的核心是低功耗! 低功耗就是要让设备尽量高效地唤醒(理想的情况是,唤醒后立刻就能接收到数据,然后发送完自己的数据后立刻进入休眠),而RTC 误差越大,如上一节所述,我们就要提前更多的时间来唤醒设备,让其开始监听数据,这会使设备工作效率很低,并增加功耗。
注意:如果校准周期比较长(例如4秒校准一次),那么还需要考虑短时间内温度变化大的精度的影响(例如,通过片上温度传感器感知到温度短时间内有0.5度的变化,应该立刻进行一次校准)。这里实现就不考虑了。
测试代码test/test_rtc0_timer0.c中,测试了 RTC硬件定时器的基本定时功能。
(代码中还测试了timer0硬件定时器,以前的实现中使用了timer0硬件定时器,随本系列文章更新,后面会修改协议栈内部实现,不在使用timer定时器。驱动timer的时钟源头是来自HFCLK,在使用外部32M晶振产生HFCLK的条件下,2s 定时的误差在10us内)
源码文件nrf52840/NrfRadioDrv.c中,实现了 radio的基本操作,如何radio 配置成 BLE的使用方式,源码中有详细的注释。
nordic nrf52840的芯片手册中,对radio的收/发状态转换描述的很详细,这里不再赘述。
源码文件test/test_radio.c,基于上述 RTC定时器和 radio驱动,实现了周期广播(只在37通道上,不可被连接,不可被主动扫描),使用手机可以看到该设备的广播信息。
下一篇文章,会详述 BLE 的链路层数据包基本格式,和在nrf52840上如何配置。
PS:测试代码中使用了 systemview作为调试工具,这个后面再单独写个这个工具的基本使用文章。