FreeRTOS-message buffer
stream buffer提供了一种轻量级的数据流传递方式,所谓数据流,即数据的收发都是以字节为单位的。例如,stream buffer的发送数据API:xStreamBufferSend,当我们需要发送N个字节时,当前buffer空间如果不够写入N字节,该API仍旧会根据当前可用空间来写入尽可能多的字节,并返回最终成功写入的字节数。stream buffer的获取数据API:xStreamBufferReceive,当我们尝试最大获取N字节数据时,即使当前Buffer并没有那么多的数据,该API 仍旧会根据当前buffer内的数据量返回尽可能多的数据,并最终返回成功获取到的字节数。
这是因为数据流,是没有数据“边界”的概念,发送时会根据当前可用空间大小尽可能多的发送数据。获取数据时,也是尽可能多的获取数据,能获取多少就获取多少。发送和接收过程可能会在任意一个字节发送/接收完成后结束。
message buffer是基于stream buffer来实现的。因此使用message buffer的场景中也只能有一个writer(任务或中断服务程序),也只能有一个reader(任务或中断服务程序)
与stream buffer相比,message buffer就提供了数据“边界的概念”。其发送/获取数据都是以消息为单位的(一个消息的长度可以任意)。例如:
对于发送消息API:xMessageBufferSend,同样是发送N个字节,该API 要么是将N字节全部发送成功,要么就一个字节也不发送(buffer内的剩余空间不够完整的存放一个消息),我们称为发送了一个大小为N的“消息”。
对于获取消息API:xMessageBufferReceive,每次调用要么获取数据大小为 0(buffer为空,没有消息),要么获取的数据是之前发送的一个大小为N的消息。
对于stream buffer和message buffer的区别,假设我们使用stream buffer的API,发送了两次数据,一次是3字节,一次是4字节。
同样的数据量,使用message buffer,一次是发送了一个3字节的消息,一次是发送了一个4字节的消息
它们的区别如下图所示: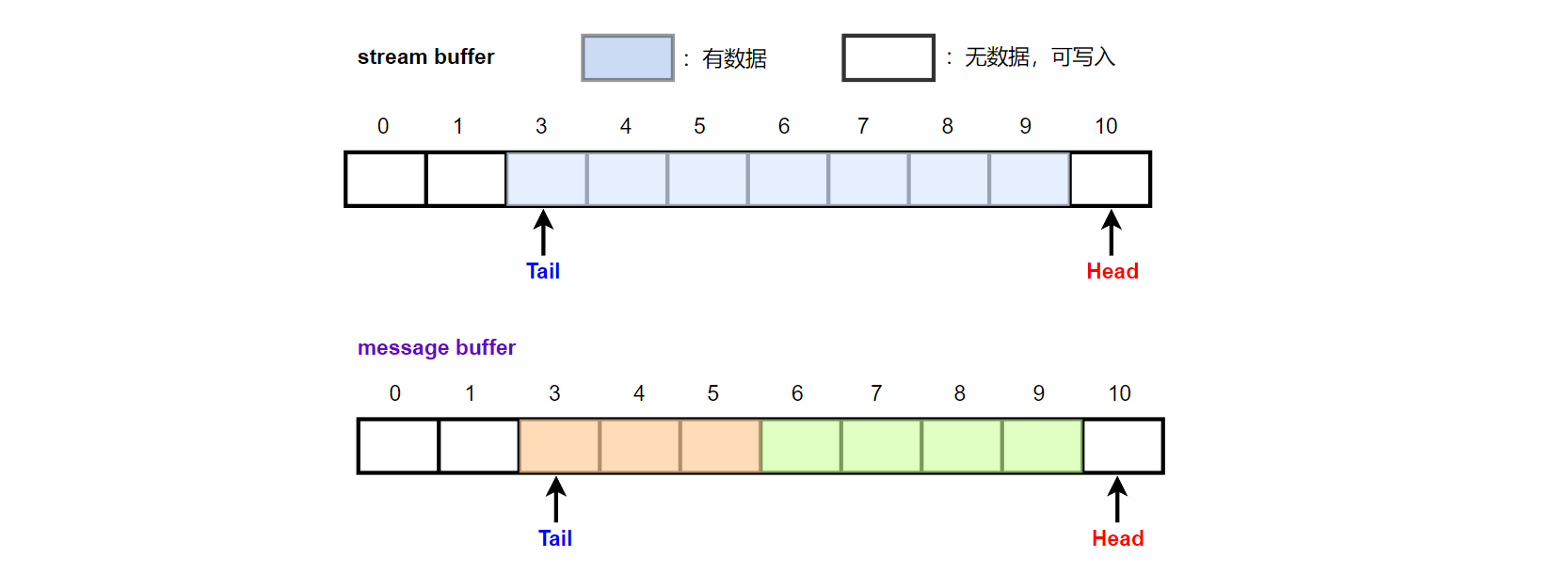
对于stream buffer来说,数据是无边界的,存储在buffer里的就是字节流,对于上图存储在stream buffer中的 7 个字节,stream buffer可以通过一次获取数据API 全部读出来。
而对于message buffer来说,其中存储的数据是有边界的,一个是3字节的消息,另一个是4字节的消息。一次调用获取数据API,我们只能获得第一个3字节数据,再次调用一次获取数据API,才能获得剩下的 4 字节数据(message buffer不能通过一个API一次性获取这7字节,因为它们是两个消息)。
message buffer如何知道消息的边界?
message buffer通过向buffer中插入一个长度字段,来实现识别消息的边界。
例如,当我们向message buffer中发送了一个3字节的消息,一个4字节的消息,message buffer 内部的存储实际为:
如此,当获取数据(消息)时,通过第一个长度字段就可以知道后续消息的实际长度,并按该长度读出完整的消息数据。
PS:32位处理器上,消息数据前的长度字段为 4 字节,不是上图的 1 字节。所以一个10字节的消息,实际占用的空间大小是14字节
message buffer的应用
如果你的应用场景中有一个采集任务,它需要采集多种数据,之后封装成多种消息(每个消息长度不一),并发送给另一个数据处理任务。
这种情况下,由于只有一个writer/reader,message buffer 可以作为消息队列的替代方案。 与消息队列一样,massage buffer也具有识别消息边界的功能,可以以消息为单位进行写/读,但message buffer每个消息的长度可以不一样(消息队列中每个消息长度是一样的,即使一个消息中有用数据实际很少,但占用空间大小是固定的),空间利用率会更高。
message buffer的使用和stream buffer的使用方式基本一致:
首先需要创建一个message buffer:
1 | MessageBufferHandle_t xMessageBufferCreate( size_t xBufferSizeBytes ); |
- xBufferSizeBytes:创建的
message buffer所占空间的大小(以字节为单位) - 返回值:message buffer的句柄,如果返回NULL,表示创建失败(堆空间不足)。
发送数据:
1 | size_t xMessageBufferSend( MessageBufferHandle_t xMessageBuffer, |
- xMessageBuffer:message buffer句柄(xMessageBufferCreate 的返回值)。
- pvTxData:指向需要发送的消息的地址
- xDataLengthBytes:消息长度
- xTicksToWait:如果message buffer内空间不够,该值指定阻塞等待多久
- 返回值:返回xDataLengthBytes 表示成功地将完整消息写入了,返回0 表示写入失败(空间不足)。
获取数据:
1 | size_t xMessageBufferReceive( MessageBufferHandle_t xMessageBuffer, |
- xMessageBuffer:message buffer句柄(xMessageBufferCreate 的返回值)
- pvTxData:用来存放所获取的消息的地址
- xBufferLengthBytes:pvTxData所指向空间的大小
- xTicksToWait:获取不到消息时,阻塞等待多久
- 返回值:本次获取的消息的长度。要么为0,要么是一个完成消息的长度。
注意:如果message buffer中可能存在的最大消息的大小为N,那么调用xMessageBufferReceive获取消息时,pvRxData所指的用来存放获取的消息的空间,其大小xBufferLengthBytes应该大于等于N,否则该消息永远无法从message buffer中取出。
一个简单的使用样例: task_a 向 message buffer写入消息,task_b 从message buffer中读取消息。
任务代码如下:
1 |
|
main 函数如下:
1 |
|
运行结果如下:
1 | start FreeRTOS |
ps:需要注意文章代码中的日志输出函数,产品代码中如果需要使用的话,需要考虑线程安全性(多任务安全性),因为中断/任务切换可能发生在另一个任务正在输出日志但还未输出完的时候,这就可能造成日志错乱