FreeRTOS-stream buffer内部细节
使用 stream buffer的前提,一定要明确使用场景中只有一个writer(中断服务或任务),也只有一个reader(中断服务或任务)。正是因为在只有一个writer,一个reader的前提下,使得stream buffer在内部实现中不必对读/写数据过程进行临界区保护。
PS:当然,非要存在多个写/读的应用场景下使用stream buffer也是可以的,但是需要开发者使用临界区对调用的相关API 进行保护,并且不能使用API 中的等待超时参数(需要设置为0)。
stream buffer的底层是基于一个循环数据来实现的: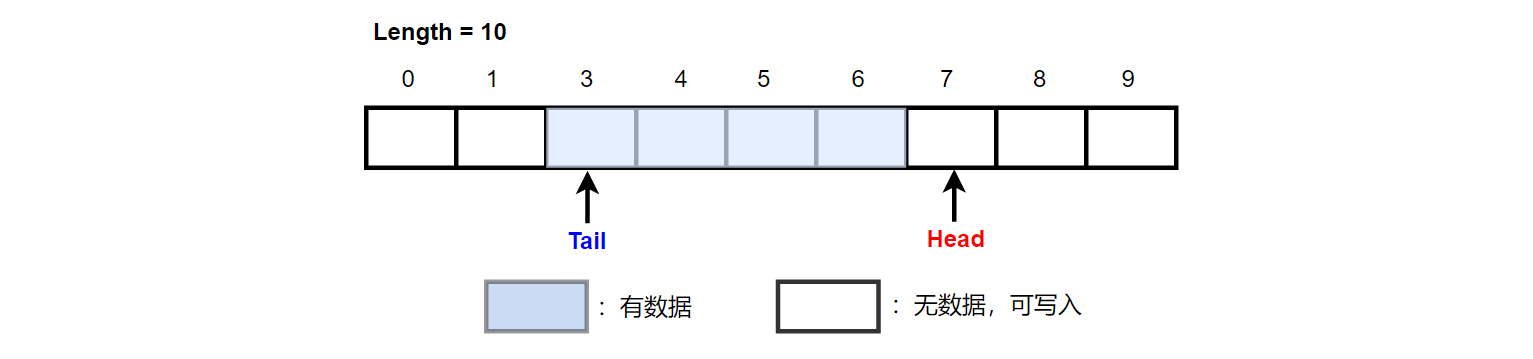
其中,Head指向第一个可写的位置,Tail指向第一个可读的位置,当它们移动到数组结尾时,会回转到数组开头。
1 基于循环数组如何判断,可读数据大小,可写空间大小?
情况1: Tail 在左边,Head 在右边
这种情形下,
可读数据的大小 = Head - Tail
可写空间大小 = Length - (可读数据大小) = Length + Tail - Head
情况2: Head 在左边,Tail 在右边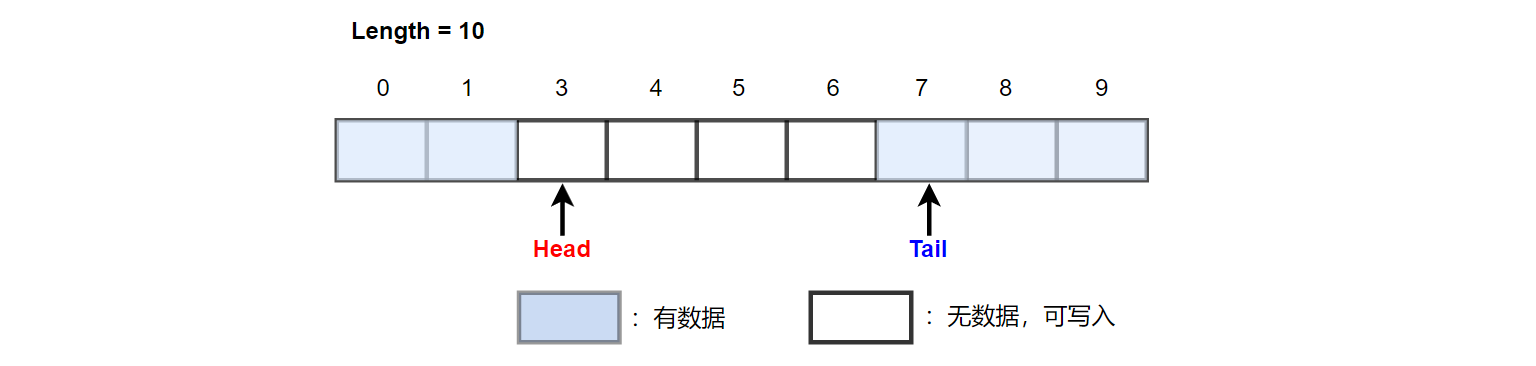
这种情况下,
可写空间大小 = Tail - Head
可读数据大小 = Length - (可写空间大小) = Length + Head - Tail
综上两种情况,
计算可写空间大小时,我们总是可以计算:
可写空间大小 = Length + Tail - Head
之后,再加一个后置判断, 如果 可写空间大小 >= Length,说明就是情况1,此时可写空间大小-Length 就是最终可写空间大小。
同理,计算可读数据大小时,我们总是可以直接计算:
可读数据大小 = Length + Head - Tail
之后,再加一个后置判断, 如果 可读数据大小 >= Length,说明就是情况2,此时可读数据大小-Length 就是最终可读数据大小。
使用循环数组的一个问题是如何判断数组满和空? 按照上面的逻辑,当数据被填满时,Tail和Head指针会指向相同的位置,这和判空条件一致了。因此,FreeRTOS用了一个trick,在申请数组空间时,申请的实际大小为外部传过来的大小参数 + 1,如下所示:
xStreamBufferGenericCreate函数中的代码段:
1 | if( xBufferSizeBytes < ( xBufferSizeBytes + 1 + sizeof( StreamBuffer_t ) ) ) |
而判断可用空间大小时,会将计算获得的减 1 再返回,如下所示:
xStreamBufferSpacesAvailable函数中的代码段:
1 | do |
因此,最终数组满的条件(即判断可用空间大小为0),实际是数组内部还剩1字节空间(内部额外添加的1字节)。
2 stream buffer的读写过程是否需要临界区保护?
仅从读,写这两件事本身来讨论,stream buffer是完全不需要临界区来保护读写过程的。
例如,stream buffer的当前状态如下图所示:
对于writer来说,它在写数据时仅会移动Head指针,并且由于只有一个writer,也不会存在竞争。
对于reader来说,它在读数据时仅会移动Tail指针,并且由于只有一个reader,也不会存在竞争。
剩下的就是,判断可读数据/可写空间大小时,需要同时访问Head指针,和Tail指针,此时是否需要临界区保护?
考虑内核中判断可读数据大小的具体实现代码:
1 | 1 xCount = pxStreamBuffer->xLength + pxStreamBuffer->xHead; |
由于没有临界区保护,reader任务在执行这段代码时,是可能被writer给打断的。
如果在reader在执行完第一行代码后,此时内核执行任务切换,writer开始执行,并向stream buffer中写入了数据(Head指针被“推进”了),之后当内核再次切换回reader继续执行时,会发送什么?
此时由于第一行已经执行过了(获得的是旧的Head值),那么最终计算出来的可读数据大小(writer在中间写入的没算进去)是小于当前stream buffer中实际所存数据大小的。
不过,这样并没有什么关系,stream buffer的API 会明确告知本次读取获取了多少数据,剩下的数据下次再获取就可以了。
也就是说,不使用临界区保护,当判断可读数据大小时,获得的值可能会比实际小,但这不会影响程序运行,下次还是可以读到该数据。只要不发生获得的值比实际所存数据量大这种错误情况,程序就没问题。
同理,内核中判断可写空间大小的代码也是不需要加临界区保护的,虽然可能会导致有时获得的可写空间比实际的少(使得writer只能将部分数据写入到stream buffer中),但同样stream buffer的API 会返回本次成功写入了多少数据,剩下的数据下次发送即可。 只要不发生获得的可写空间比实际可写空间大这种错误情况,程序的运行就没问题。
3 stream buffer如何实现空间不够写入本次数据时,让任务阻塞?
在介绍消息队列的文章中的,我们提到消息队列结构中存在两个任务链表成员:
- 等待发送数据任务链表:消息队列满时,当任务向该消息队列发送数据,就会被挂到该任务链表上(如果设置了超时等待)。
- 等待接收数据任务链表:消息队列空时,当任务从该消息队列中获取消息,就会被挂到该任务链表上。
如下图所示: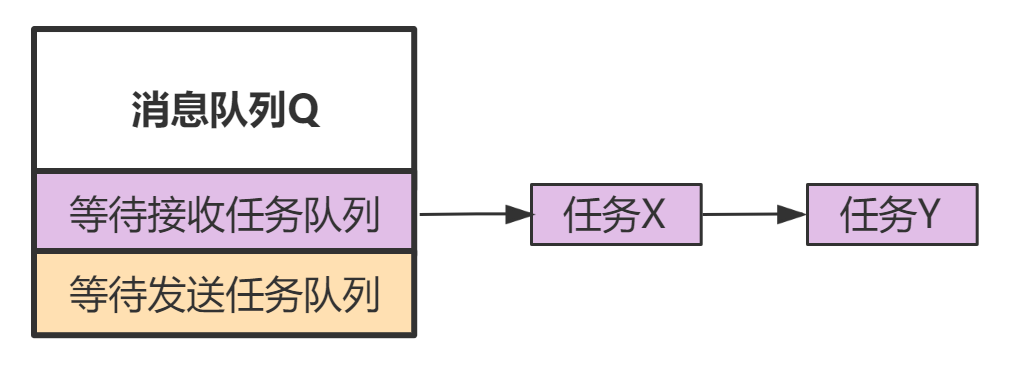
由于stream buffer也支持发送(或获取)数据时,如果stream buff空间不足(或没有数据),则任务可以阻塞等待。
因此,stream buffer中也有两个如上类似的成员,不过它们不是链表,只是任务句柄(成员xTaskWaitingToSend和成员xTaskWaitingToReceive)。因为stream buffer只有一个writer和一个reader,所以不需要链表。
由于只有一个reader,当reader从stream buffer获取数据,而stream buffer为空时,任务如果设置了等待超时参数,任务就会阻塞,并且reader的任务句柄会被保存到stream buffer的成员xTaskWaitingToReceive中。
如此当writer向该stream buffer中发送数据时,就可以通过xTaskWaitingToReceive找到等待数据的那个任务(reader),从而唤醒它。
从这里可以发现,要唤醒的目标任务是明确的(等待数据的reader),这符合task notification的使用场景。
因此,当stream buffer为空时,reader无法获取数据,此时就会调用xTaskNotifyWait来阻塞自己。 当writer向stream buffer中发送了数据后,就会通过xTaskNotify来唤醒reader(有数据了),
对于writer,当stream buffer中的空间不够写入时,也可让任务进入阻塞态,同样也是使用task notification来实现的。原理同上。
stream buffer中的临界区是干嘛用的?
如第二小节所述,由于只有一个reader和一个writer,因此stream buffer的读写并不需要临界区来保护,但无论是获取数据的API:xStreamBufferReceive,还是发送数据的API:xStreamBufferSend,其内部实现中都存在临界区代码段。
例如,xStreamBufferSend中的临界区代码段:
1 | taskENTER_CRITICAL(); |
发送数据函数中的这段临界区代码的作用,其目的并不是为了保护写的过程不被读打断。
它是为了让:“当写空间不够时,清除notify状态,以及设置pxStreamBuffer->xTaskWaitingToSend” ,即如下几个操作
1 | 1 xSpace = xStreamBufferSpacesAvailable( pxStreamBuffer ); |
整体成为一个“原子操作”。
否则,没有临界区保护的话,可能发生如下情况:
在writer任务在执行1后内核可能刚进行任务调度,并切换到reader并读取了一批数据(此时可写空间有了),reader执行完后会调用sbRECEIVE_COMPLETED,该宏的实现是调用xTaskNotify(pxStreamBuffer->xTaskWaitingToSend)通知writer,但本次通知不会成功,因为此时pxStreamBuffer->xTaskWaitingToSend = NULL(writer被打断了,还没执行到 3 处的赋值代码)。
之后,内核再次执行任务切换,并切换回writer任务,此时实际上可能已经有足够的可写空间了(中间切换成reader任务时被读走了一批数据),但由于reader的notification丢失了,导致writer出了临界区后,执行xTaskNotifyWait时,检测不到notification,导致writer进入阻塞休眠(实际上此时可写空间可能已经满足需求了)。