FreeRTOS-软件定时器使用注意事项
软件定时器可以识别的基本时间单位:
内核在每次tick中断发生时,会更新其内部的tick计数值加 1,来实现“感知时间”功能(更多信息可以参考文章:FreeRTOS-内核对时间的测量)。而FreeRTOS提供的软件定时器,就是基于内核的tick计数值,来实现定时功能的。
例如,假设内核的tick中断产生的周期为100 ms,即每100 ms产生一次tick中断。如果一个定时器设定的超时时间为 1秒,那么识别该定时器超时,就是识别从该定时器启动后,tick计数值是否增加了10。
因此,FreeRTOS的软件定时器,可以识别的基本时间单位,就是内核产生tick中断的周期。tick中断周期由工程配置文件FreeRTOSConfig.h中定义的configTICK_RATE_HZ决定:
1 |
如上配置,就是设置内核产生tick中断的频率,为一秒产生100次tick中断,即周期即为 10 ms。 那么软件定时器,可以识别的基本时间单位就是10ms,可以设置的超时时间需要是 10ms 的 n 倍(n为大于 0的整数)。
如果设定的超时时间小于10ms,对定时器来说就是0,这个参数是不合法的,如果我们在开发阶段使能了断言宏,就会立刻报错。
在开发阶段,我们应该实现工程配置文件FreeRTOSConfig.h中的断言宏 configASSERT。很多配置、参数错误的问题,内核都会通过configASSERT给出错误的位置。例如一个简单的实现:
1 | extern void vAssertCalled( const char * pcFile, uint32_t ulLine ); |
然后在 main.c 或其它源文件中实现具体的函数,将出错的文件和具体行号信息输出:
1 | void vAssertCalled( const char * pcFile, uint32_t ulLine ){ |
如果定义了上述宏configASSERT,那么在调用 API xTimerCreate创建软件定时器时,如果传入的定时器超时时间,小于软件定时器可以识别的基本时间单位,就会立刻给出错误提示。
软件定时器服务任务(prvTimerTask)优先级的影响:
在之前的两篇文章FreeRTOS-软件定时器的实现原理和FreeRTOS-软件定时器的使用 中,介绍了FreeRTOS的软件定时器,是一种分离式的设计。如下图所示: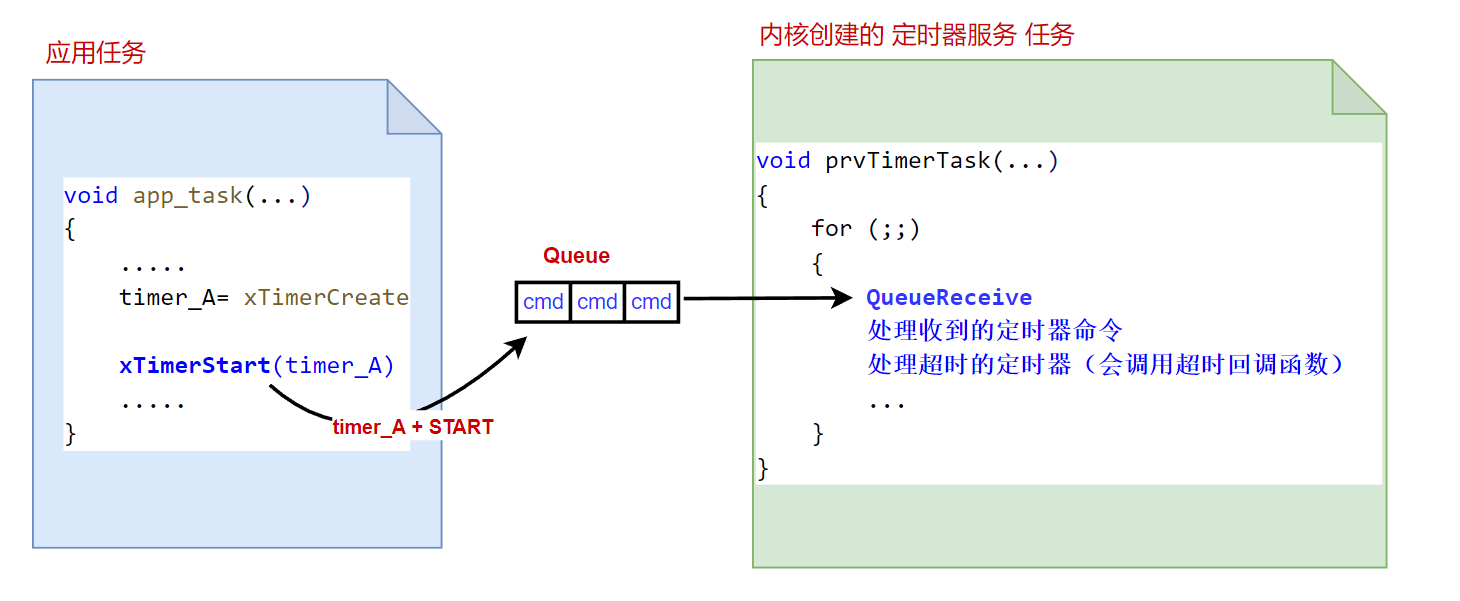
当我们调用软件定时器相关的 API 时,内部实际是发送了相应的定时器命令到软件定时器专用的消息队列中,而软件定时器服务任务(或称为daemon task,使能FreeRTOS的软件定时器功能后,内核在启动时会自动创建该任务),即上图中的prvTimerTask任务,会从软件定时器专用的消息队列中,提取定时器命令,并处理。
此外,每当有定时器的超时时间到达了,其超时回调函数(创建定时器时的参数pxCallbackFunction)也是在prvTimerTask任务中调用的。
prvTimerTask任务的优先级,在工程配置文件FreeRTOSConfig.h 中定义,如下配置即将其优先级设置为 2
1 |
由于软件定时器的超时回调函数,是在prvTimerTask任务中调用的。因此,不能让prvTimerTask任务长时间得不到运行。否则,即使一些定时器超时了,由于prvTimerTask任务得不到运行,那么也就不能调用那些已经超时的定时器 的超时回调函数。
一个简单的测试实验,配置定时器服务任务prvTimerTask的优先级为2,并创建一个周期定时器,输出信息。再创建 2个优先级均为 3的任务task_a和task_b。task_a无限循环一直空跑,task_b则每秒输出一次信息。如下所示:
1 |
|
烧录程序运行,只能看到 task_b的输出信息,看不到定时器超时回调函数的输出信息。
1 | start FreeRTOS |
这是因为,task_a任务一直保持空转,没有调用任何会阻塞task_a任务的api,所以它一直是就绪态(被运行时,就是运行态),任务调度时总是选择处于就绪状态且优先级最高的那个任务,由于task_a优先级又比prvTimerTask高,所以每次都不会选择prvTimerTask任务。task_b能得到运行,是因为它和task_a优先级一样,所以task_b和task_a轮流运行(时间片调度)。
如果将task_a、task_b和prvTimerTask优先级都设置相同,默认就是轮流调用,此时就能看到定时器超时回调函数的输出信息。
1 | start FreeRTOS |
不要在超时回调函数中调用会让任务阻塞的 API:
原因还是如上一节所述,软件定时器的超时回调函数,是在prvTimerTask任务中调用的,如果你在某个定时器的超时回调函数中,调用了会让任务阻塞的API(如vTaskDelay),那么prvTimerTask任务就会进入阻塞态,会暂停运行,那么也就不能调用那些已经超时的定时器的超时回调函数了。超时回调函数需要等到prvTimerTask任务恢复就绪态,且prvTimerTask任务被调度时才能被调用。( 但对于类似xQueueSend有超时参数的 API,当超时参数设置为 0时,任务是不会阻塞的,所以可以使用)
一个简单的测试例子:创建两个单次触发的定时器timer1和timer2,超时时间均为 1秒钟,启动时先启动timer1。在timer1的超时回调函数中调用vTaskDelay,让其延迟 5秒钟。则可以观察到,timer2的超时回调函数,需要等到 5秒延迟结束后才会被调用。
代码如下:
1 |
|
烧录运行可以看到如下输出信息:
1 | start FreeRTOS |
ps:需要注意文章代码中的日志输出函数,产品代码中如果需要使用的话,需要考虑线程安全性(多任务安全性),因为中断/任务切换可能发生在另一个任务正在输出日志但还未输出完的时候,这就可能造成日志错乱
FreeRTOS交流QQ群-663806972