FreeRTOS-硬件中断嵌套模型和内核临界区
硬件中断嵌套,是指中断发生时,中断会打断当前正在执行的“普通”代码,转而执行对应的中断处理函数。在执行中断处理函数时,如果又有一个更高优先级的中断发生,该高优先级中断可以抢占正在运行的较低优先级中断,如下图所示:任务task_a在运行时,被到来的低优先级中断IRQ1打断,在执行IRQ1中断处理函数时,又被到来的高优先级中断IRQ2打断。IRQ2中断处理函数执行完成后,回到IRQ1的中断处理函数继续运行,IRQ1中断处理函数执行完后,回到task_a继续运行。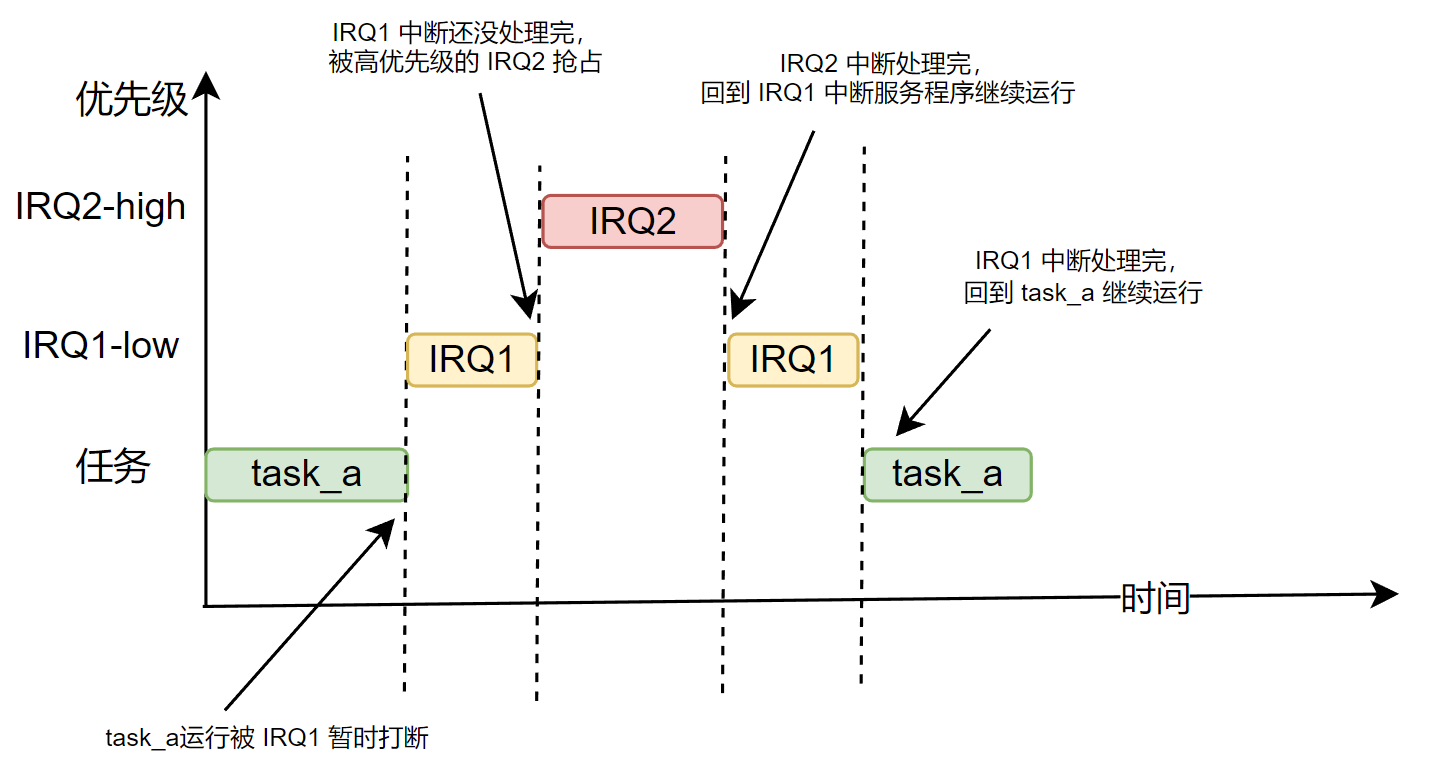
但是这种不加限制的中断嵌套模型,肯定是不能直接用在FreeRTOS中的,因为在中断处理函数中也是可以使用FreeRTOS的API(以FromISR后缀结尾的API)。假设当程序刚好执行到task_a向消息队列A中发送消息(此时会涉及消息队列A控制块的修改,消息存储区内容的修改)。这时,发生了一个低优先级中断IRQ1(打断了task_a正在执行的工作),IRQ1中断处理函数中也向消息队列A发送消息或从中提取消息(同样,也是涉及消息队列A控制块的修改,消息存储区内容的修改)。那么此时就可能会改乱消息队列A中内部的控制数据,即对同一个资源的访问冲突了。甚至,在低优先级中断IRQ执行到向消息队列A发送数据时,此时又发生一个更高优先级中断IRQ2,IRQ2中也向消息队列A中发送数据或从中提取数据,这就更加提高了发生资源访问冲突的可能。
下图演示了,task_a向消息队列A中发送消息时,被中断IRQ1打断,而IRQ1中断服务程序中也向消息队列A中发送数据,从而造成资源访问冲突(由于并发或并行访问,造成资源内部控制数据被破坏)的一种情况: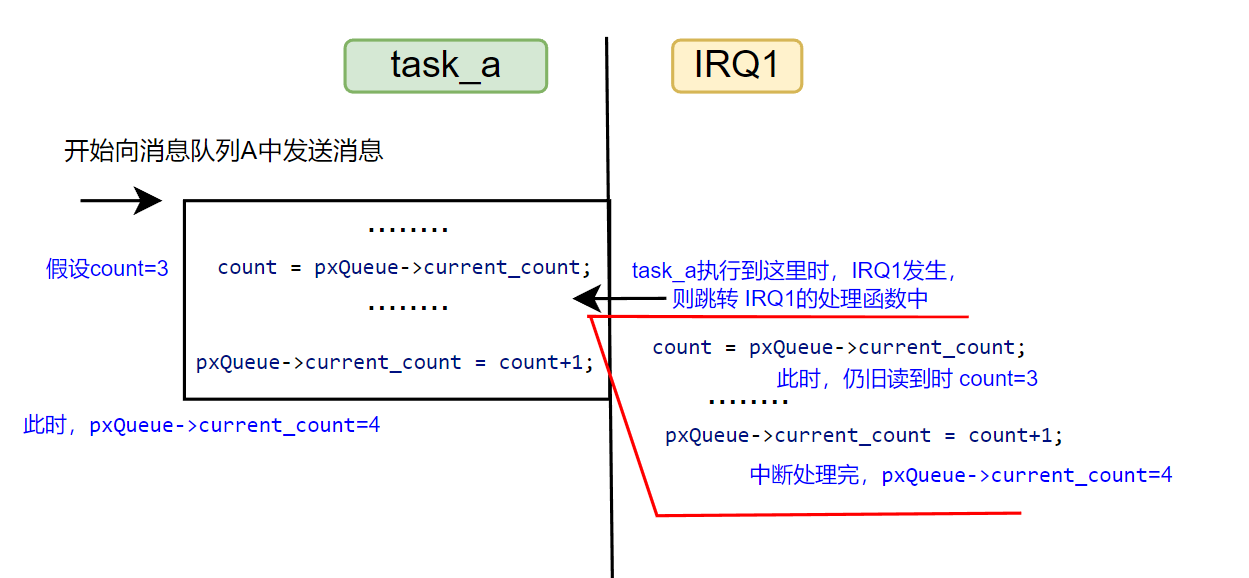
如上图所示,这种情况的冲突发生时,就会导致实际向消息队列消息队列A发送了两次数据,但最终消息队列A内部的消息计数只增加了1。
实际上,这种共享资源(多个任务或中断都会访问的资源)访问冲突问题,不止在任务和中断间会发生,任务和任务间也也会发生。原理和上图一样,在task_a也是执行到上图的时间点时,发生了任务切换,切换到了任务task_b,而任务task_b中也同样向消息队列A中发送数据,那么就会导致上图同样的资源访问冲突问题。
备注:本文所述的 共享资源 特指:通过 FreeRTOS提供的 API访问的那些资源(如消息队列,信号量等),当它们会被多个任务或中断访问时,即为共享资源。
如何解决这种共享资源访问冲突的问题? “临界区”机制,就是用来处理这种对共享资源竞争访问(多个任务/中断都会访问某个相同的资源,并且可能会并发访问)导致的问题。通过将某个共享资源的访问过程用“临界区”保护起来,可以保证当一个访问者在临界区中访问资源时,其它访问者不能同时进入该临界区中访问资源,只能等待当前在临界区中的访问者结束其访问过程,其它访问者才能进入临界区中访问资源。或者说,用“临界区保护起来的代码段”,是串行执行的,不会并发(多核就是并行)执行。如下图所示: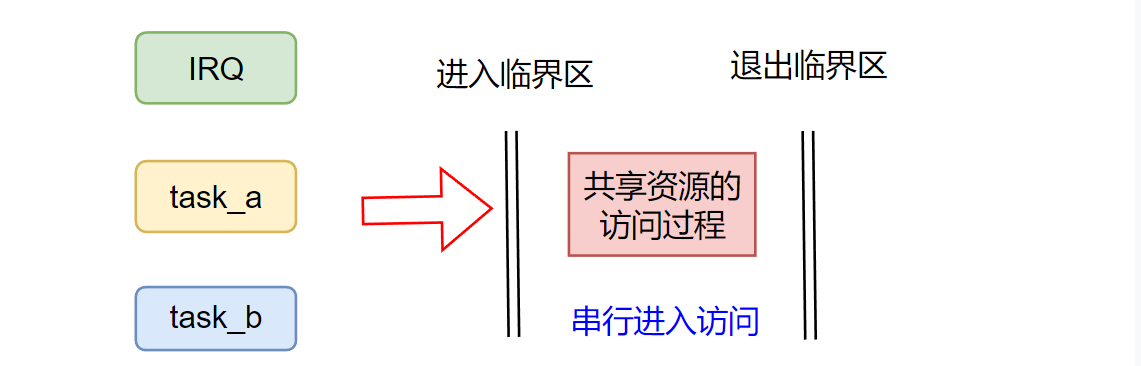
剩下的问题就是如何实现“临界区”了。
对于任务和任务之间的资源竞争问题,最简单的方法,就是通过禁止任务调度来解决。即,访问共享资源前,先关掉内核的任务调度功能(开始进入临界区),这样在任务的整个访问共享资源期间,内核是不会进行任务切换的,不会切换到其它任务,也就没有任务间的数据竞争了。当访问共享资源完成后,再打开内核的任务调度功能(退出临界区)。FreeRTOS中vTaskSuspendAll和xTaskResumeAll就是分别用来暂停任务调度和恢复任务调度的。
但是对于任务和中断之间,以及中断和中断之间的资源竞争,仅仅暂时关闭内核的任务调度是无法解决的。因为,关闭内核的任务调度,并不会关闭中断。所以如果中断服务程序中,也会访问某个共享资源,那么仍旧可能形成任务和中断服务间的资源竞争,如果不加以限制,就会导致资源内部数据被破坏。这种情况,一个简单、直接的实现进入临界区的方法,就是直接屏蔽所有可以屏蔽的中断。退出临界区时,再取消屏蔽。这样任务执行期间就不会被中断打断,也就不会有资源竞争。中断执行期间,也不会被更高优先级的中断打断,同样也不会形成资源竞争。
但直接屏蔽所有可以屏蔽的中断,过于简单粗暴,毕竟有的中断服务程序中,并没有访问共享资源(都不访问,也就没有资源竞争)。因此,FreeRTOS的做法是进入临界区时,只屏蔽部分中断。这个屏蔽操作,cortex-m处理器可以通过向 BASEPRI 寄存器中写入值x,即表示屏蔽所有优先级小于等于x的中断,FreeRTOS中的宏taskENTER_CRITICAL(中断处理函数中应该使用taskENTER_CRITICAL_FROM_ISR)实现进入临界区就是这么做的。而退出临界区,就是取消屏蔽,通过向 BASEPRI 寄存器中写入0来实现,FreeRTOS中的宏taskEXIT_CRITICAL(中断中应该使用taskEXIT_CRITICAL_FROM_ISR,并传入调用taskENTER_CRITICAL_FROM_ISR时的返回值)就是如此实现退出临界区的。
中断优先级屏蔽范围的设置,就是FreeRTOS工程配置文件FreeRTOSConfig.h中的宏configMAX_SYSCALL_INTERRUPT_PRIORITY(新版本名称为configMAX_API_CALL_INTERRUPT_PRIORITY)设置的值。例如,将configMAX_API_CALL_INTERRUPT_PRIORITY设置为3,则此时FreeRTOS的中断嵌套模型如下图所示:为了方便描述,图中假设中断优先级只有1-7,并且优先级数值越高,中断的真实优先级就越高。(cortex-m3/4是反着来着,数值越低,真实优先级越高)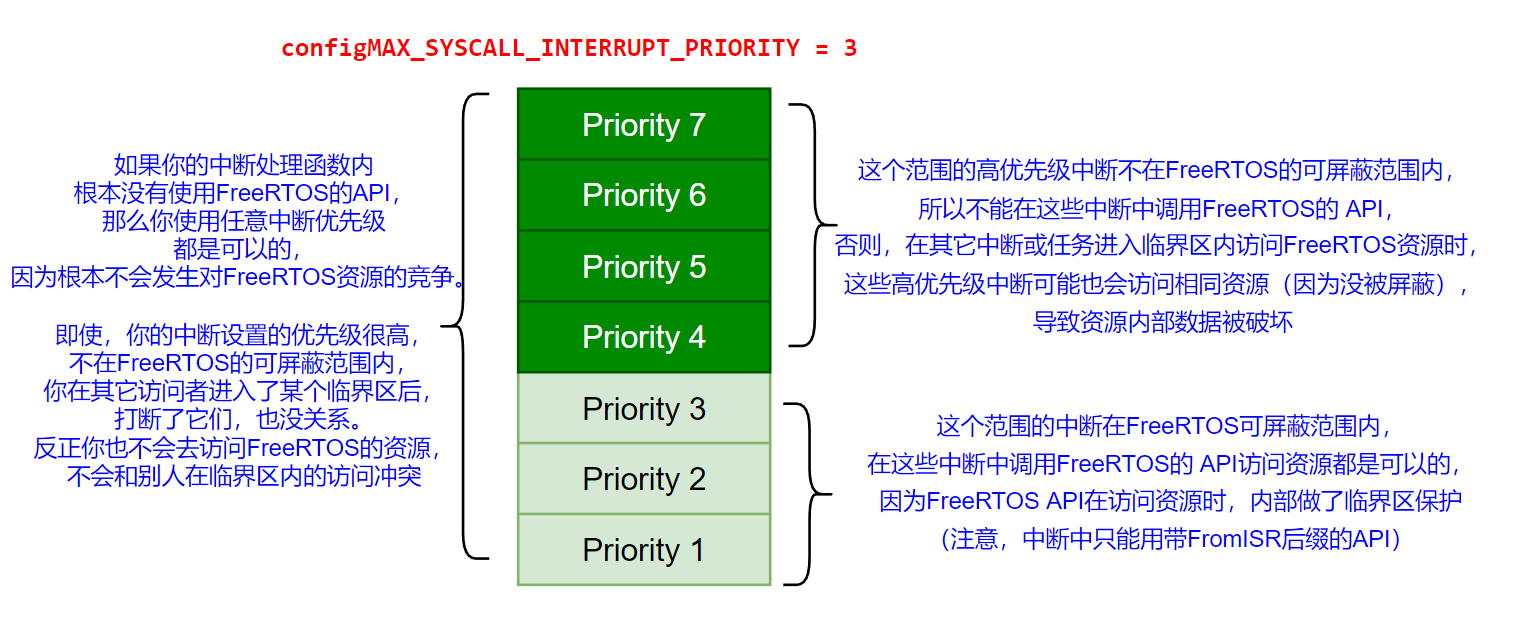
如上图所示,当configMAX_API_CALL_INTERRUPT_PRIORITY = 3时,每次访问共享资源前,需要先进入临界区(屏蔽1-3优先级的中断),资源访问完成后,则退出临界区(取消屏蔽,中断又可以正常响应了)。
对于
任务a和任务b之间的资源竞争(当它们都会访问同一个FreeRTOS资源时),当任务a成功进入临界区后,此时优先级小于等于 3的中断均被暂时屏蔽了,FreeRTOS的任务切换中断优先级PendSV是最低中断优先级,因此也是被屏蔽状态。所以在进入临界区后,访问资源这段时间内不会发生任务切换,因此也就不会存在两个任务间的访问冲突。对于
任务a和中断b处理函数之间的资源竞争,在FreeRTOS的设定的中断嵌套模型下,如果你的中断b处理函数会调用FreeRTOS的API访问某个任务a也会访问的共享资源,那么中断b的优先级必须小于等于3,这样FreeRTOS的进入临界区的宏taskENTER_CRITICAL(中断处理函数中应该使用taskENTER_CRITICAL_FROM_ISR)才能暂时屏蔽这些中断。此时,任务a进入临界区后,中断b一定是被屏蔽状态,也就不会和任务a形成冲突了。反之,如果中断b优先级大于3,那么你的任务a进入临界区后,在访问资源过程中,就可能被中断b打断(不在FreeRTOS可屏蔽中断范围内),如果中断b处理函数中也访问相同资源,那么就会造成资源访问冲突。对于
中断a和中断b之间的资源竞争,如果中断a和中断b会访问某个相同的共享资源,同样它们的中断优先级都必须小于等于3,这样当任意一个中断先进入临界区后,则另一个中断由于被暂时屏蔽,也就不会和先进入临界区的那个中断形成访问冲突。如果,你的中断是在处理一个非常重要的事件,不想因为被其它中断抢占而导致响应出现延迟,那么就需要将该中断优先级设置的比较高(高于
configMAX_API_CALL_INTERRUPT_PRIORITY),避免被FreeRTOS的临界区处理给暂时屏蔽了。但是,一但你的中断优先级高于configMAX_API_CALL_INTERRUPT_PRIORITY,就不能在该中断处理函数中使用任何FreeRTOS的 API去访问资源。因为,此时该中断已经不受FreeRTOS的临界区处理控制了,如果该中断发生时,访问的资源,是其它任务或中断(低优先级)正在访问的资源,那么就可能造成访问冲突,破坏资源内部数据。最后,如果你的中断处理函数中压根没有使用FreeRTOS的任何API,那么该中断可以使用任意中断优先级,因为根本不会和其它使用FreeRTOS API访问资源的任务或中断形成冲突。
综上,FreeRTOS内部,通过使用向 BASEPRI 寄存器中写入值configMAX_SYSCALL_INTERRUPT_PRIORITY,来屏蔽部分中断,实现临界区机制。
对于那些通过 FreeRTOS API访问的资源,如消息队列,信号量,软件定时器等。当我们在多个任务或中断中使用它们时,其实我们并未做临界区相关的处理,也没有碰到前文所述的访问冲突问题,这是因为FreeRTOS在这些 API的内部已经做了临界区处理,所以我们可以安全地在多个任务或中断中调用它们。
对于开发者使用来说,需要注意的是,你的中断处理函数是否有使用到FreeRTOS的 API 访问某个资源。如果有使用,那就需要将其中断优先级设置小于等于configMAX_SYSCALL_INTERRUPT_PRIORITY的值表示的中断优先级,使该中断被纳入内核可屏蔽中断范围中,从而避免中断和任务,或中断和中断间,对内核资源地访问形成冲突;如果没有使用 FreeRTOS的 API,那么根据你的实际需求可以自行设定任意的中断优先级。
如果是访问开发者自定义的数据呢?例如,开发者自定义的某个结构体对象,每次访问该结构体对象涉及到内部多个成员的修改,如果该对象在多个任务或中断处理函数中被访问,如何保证这些访问不会冲突。
这种情况,就需要我们在访问该结构体对象前,自己主动调用taskENTER_CRITICAL(中断处理函数中应该使用taskENTER_CRITICAL_FROM_ISR)进入临界区,访问结束后,调用taskEXIT_CRITICAL(中断中应该使用taskEXIT_CRITICAL_FROM_ISR,并传入调用taskENTER_CRITICAL_FROM_ISR时的返回值)退出临界区。
此外,如果某个中断处理函数也会访问该结构体对像,该中断的中断优先级也需要设置小于等于configMAX_SYSCALL_INTERRUPT_PRIORITY表示的中断优先级,使得该中断能被纳入临界区会屏蔽的中断范围内。避免任务在进入临界区后,在访问该结构体对象的过程中,发生中断打断任务的执行(该中断处理函数中也会访问该结构体对象),形成访问冲突。
虽然,通过临时关闭中断的,可以实现临界区(临界区内,互斥地访问资源)。但关闭中断的方式,过于粗糙。毕竟中断都是用来响应重要事件,临时屏蔽中断很可能会导致一些重要事件的响应被延迟。因此,非必要的情况下,不应该使用这种方式。实际应用开发中,当我们需要互斥的访问共享数据时,应该首先考虑使用使用互斥量(mutex)形成临界区,以保护共享数据的访问过程。