FreeRTOS-任务优先级和内核任务调度中断优先级(SysTick,PendSV)
1 任务优先级
FreeRTOS中的任务优先级,是FreeRTOS自己抽象出来的概念。只作用于FreeRTOS创建出来的任务。FreeRTOS内核每次进行任务调度时,总是选择优先级最高的就绪任务来运行。
在工程配置文件FreeRTOSConfig.h中定义了当前系统中,允许使用的任务优先级数量:
1 |
即,使用xTaskCreate时传递的优先级参数uxPriority的值应该在[0,3)中,值越大表示任务的优先级越大。
任务优先级的唯一作,就是内核在每次调度任务时会选择优先级最高的就绪任务来运行(如果有多个任务的优先级相同,且都是当前最大的,默认是轮流调度)。
在内核的实现中,会根据宏定义configMAX_PRIORITIES的值,创建对应数量的就绪任务队列,例如configMAX_PRIORITIES = 3时,会创建3个就绪任务队列。例如,当我们创建一个优先级为 2 的任务 A。两个优先级为 1 的任务 B 和 C,以及一个优先级为 0 的任务 D ,则就绪任务队列的状态如下: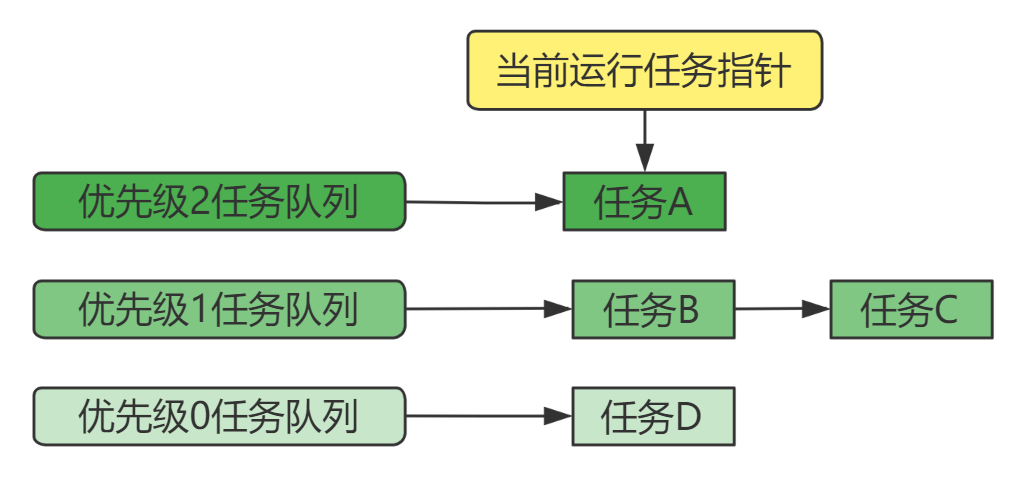
这样做的好处时,每个任务在创建时,直接挂到对应优先级任务队列上即可。而内核在选择任务调度时,直接从有任务的最高优先级任务队列上选择即可(会选择这个任务队列中最近一次所运行任务的下一个任务,内核的任务链表结构中,有一个成员指向本任务队列(链表结构)中最近运行的那个任务,如此即可实现同一优先级的任务间轮流调度)。
更详细的任务调度和管理信息,可以参考文章:任务调度和管理-就绪任务队列
而向任务队列中插入新任务,从任务队列中获取下一个要运行的任务,可以参考文章FreeRTOS-内核链表数据结构 最后的总结部分。
2 内核任务调度硬件中断优先级
FreeRTOS任务切换使用的硬件中断优先级,是工程配置文件FreeRTOSConfig.h文件中设置的宏configKERNEL_INTERRUPT_PRIORITY 。
该值定义了FreeRTOS的 tick中断的优先级。 在cortex-m3/m4 平台上,FreeRTOS默认使用SysTick定时器(所有基于cortex-m3/m4 的MCU中都会有这个定时器,所以很方便移植)来产生tick中断(内核运作的心跳,每次tick中断发生时,会在中断处理函数中执行任务调度相关工作)。所以,在 cortex-m3/m4 平台上,宏configKERNEL_INTERRUPT_PRIORITY的值就是SysTick定时器的中断优先级。
每当tick中断周期到达,内核需要做的事情有:
- 更新内部“时间计数tick值”
- 遍历delay任务队列将等待时间超时的任务恢复就绪状态(例如,任务调用
vTaskDelay延迟的时间到达了,或任务调用xQueueReceive等待消息队列的超时时间到达了)。 - 检查是否需要进行任务切换,执行任务切换等等工作。
但上述全部工作实际是由SysTick和PendSV两个中断共同完成的。SysTick中断中只完成了部分工作,将内核用来记录时间的变量xTickCount加1;将延迟队列pxDelayedTaskList中超时的任务挂回就绪队列中;根据内部状态和当前系统配置(如是否抢占调度,同优先级是否时间片调度(轮流调度))决定是否执行任务切换。如果检查确认了本次需要执行任务切换,内核就会设置”挂起”PendSV中断,并退出systick中断处理函数。
当退出的systick中断处理函数后,就会进入PendSV中断(因为有中断“挂起”标记在)处理函数中,并执行实际的任务切换工作(选择当前最高优先级的就绪任务,并运行它)。
这里的PendSV中断,其中断优先级也是 宏configKERNEL_INTERRUPT_PRIORITY定义的值。
即,SysTick和PendSV两个与内核任务调度相关的中断,它们的的中断优先级都是宏configKERNEL_INTERRUPT_PRIORITY定义的值。FreeRTOS默认都是将它们设置成最低中断优先级。
在《ARM Cortex-m3/m4权威指南》一书中,介绍的SysTick和PendSV配合实现任务切换,是将SysTick中断优先级设置成高优先级,PendSV设置成最低优先级。这里与FreeRTOS中实际使用设置的不同,往往给初学者造成困惑。
首先结论是: 书中的方案和FreeRTOS的方案,都是正确的,甚至即使是将PendSV的优先级设置为高优先级都是可以的,但是PendSV设置成高优先级虽然可以,但并不合理。所以,实际使用中都是将PendSV的中断优先级设置为最低。至于SysTick,可以设置为高优先级(官网内核的SysTick中断处理函数,默认是基于最低优先级实现的,调高则需要一些改动,见后文描述),也可以设置为最低优先级,具体采用什么方案,开发者可以根据自己的实际应用需求而设定(例如,你没有额外的硬件定时器资源了,所以你复用了FreeRTOS内核使用的SysTick定时器,并在SysTick中断处理函数中添加一些自己的代码逻辑,而这些代码逻辑依赖精确的时间,所以需要将SysTick中断优先级调高,避免被其它中断抢占,导致响应延迟)。
那么,为什么FreeRTOS在默认都是将SysTick和PendSV中断优先级设置成最低呢?个人整理了以下一些原因。
2.1 PendSV优先级设置成最低的一些原因:
首先,内核并不只是在每次
tick中断发生时才执行任务切换。当我们使用抢占式调度时,新建一个高优先级的任务;调用vTaskDelay让任务延迟;等待某个资源(等待消息队列有消息,等待信号量可用等);任务向消息队列中发送一个消息等等,很多操作都可能会触发任务切换工作,所以单独使用PendSV中断来做任务切换工作。这样在所有需要执行任务切换的地方,设置“挂起”PendSV中断,即可触发执行任务切换。PendSV中断处理函数中只做了任务切换工作(选择当前最高优先级的就绪任务,并运行它),并不涉及到内核中和“时间”相关处理的工作。因此它的中断优先级设置为最低没什么影响,因为即使PendSV中断被其他高优先级中断抢占,导致执行任务切换延迟了,又有什么关系呢?反正高优先级中断服务结束后,还是可以继续完成任务切换的(中断处理函数中只做最重要和必须的事情,并尽快退出中断处理函数,这是一个基本共识。所以即使有高优先级中断抢占,造成任务切换延迟,这个延迟也不高。总不能你的程序逻辑,依赖于在精确时间点执行任务切换吧?)。反之,将PendSV优先级设置成高优先级(需要额外的内核配置才行,下文有详细说明),那么PendSV就可能抢占同时发生的其他 IRQ,导致被抢占的 IRQ响应出现延迟。而我们使用其它 IRQ的目的,都是为了做一些需要即时处理的重要工作(如按键中断处理,数据接收中断处理等),相对“不重要”的任务切换可能会抢占了“更重要”的对外响应,这是不合理的。所以将PendSV优先级设置为最低,更合理。这样可以尽可能地减小任务切换中断对我们开发的其它功能的影响。在Cortex-M3/m4 内核的默认配置下,当除了目前正在处理的中断,还有其它中断处于活动状态时,(当前处理的中断结束时)只能从Handler模式(执行中断处理函数时所处的模式)转到Handler模式,不允许直接从Handler模式转到Thread模式(普通代码执行时的模式)。在ARM7架构(cortex-m3/m4就是arm7架构)的参考手册《Armv7-M Architecture Reference Manual》的 B1.5.8 Exception return behavior 一节中的Integrity checks on exception return 部分有相关描述:
Normally, if at least one exception other than the returning exception is active, the return must be to Handler mode. This checks for a mismatch of the number of exception returns. Software can use the CCR.NONBASETHRDENA to disable this check, see Configuration and Control Register, CCR on page B3-604.
基于这个限制,如果我们将PendSV的优先级设置为比某个外部中断优先级高,当在运行任务task_a时,外部中断请求(IRQ)到来,进入对应IRQ中断处理函数,该中断处理函数还未执行完成时,又发生任务切换中断PendSV。PendSV优先级更高,抢占当前这个IRQ,在PendSV中断处理函数中执行任务切换,并运行任务 task_b,这会使得处理器从Handler模式切换成Thread模式。但此时被抢占的那个IRQ都还未运行完成,这种情况下,是不允许直接从Handler模式切换成Thread模式的!否则,硬件会产生UsageFault异常,如果你没有使能这个异常中断,则会升级为HardFault异常,如下图所示:
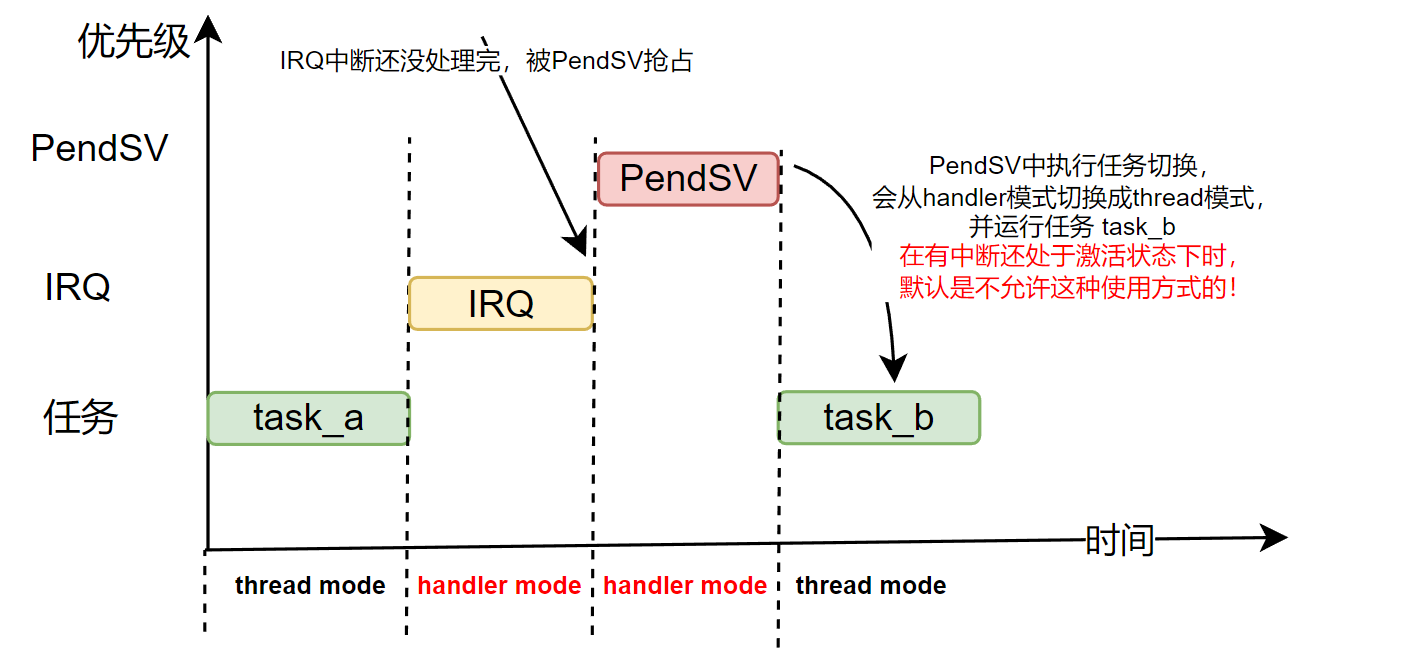
这也是默认配置下,PendSV必须是最低优先级的原因。这个异常也很容易验证,你可以随便创建几个任务,然后将configKERNEL_INTERRUPT_PRIORITY这个值设置成更高的中断优先级,然后配置一个较低优先级的按键中断。在按键中断处理程序中,你原地循环保持一段时间,这样当Tick周期到来时,会触发PendSV中断来执行切换任务,PendSV中断会抢占当前的按键中断,当PendSV中断处理函数执行完任务切换过程,并返回到被选中的任务时(从Handler模式返回Thread模式),就会触发上述的异常(因为,此时按键中断都没结束,不允许在有其它中断还处于活动状态时,从Handler模式切换到Thread模式)。既然是默认配置,那么就是可以修改。即修改成允许在还有其它中断处于活动状态下,当前正在执行的中断服务结束时,直接从Handler模式转到Thread模式。《Armv7-M Architecture Reference Manual》中也提到了修改方式,将
CCR寄存器的NONBASETHRDENA位设置为 1即可。如下所示,在main函数中可以这样配置下:1
2
CCR_CTRL_REG |= 1;此时,同样是上面提高
PendSV中断优先级的例子,就不会在产生HardFault异常中断了。(如果你花点时间折腾折腾,你会发现,如果你创建三个优先级相同的任务,然后修改按键中断服务函数,让其在原地循环久一点,比如3秒钟。当你按键时,在按键中断服务程序中的这 3秒钟时间内,内核是在 三个任务中的 某两个任务和按键中断服务程序之间来回调度。因为,基于FreeRTOS的任务切换汇编实现,按键中断服务被PendSV打断时,按键中断服务的“上下文数据”实际被保存到某个任务的任务栈中去了,所以内核虽然在三个任务中来回调度,但实际上调度到某个任务时,实际运行的是还未完成的按键中断服务。所以造成了3秒钟时间内,内核是在 三个任务中的 某两个任务和按键中断服务程序之间来回调度这个现象。)
所以,虽然通过配置,也能允许PendSV优先级调高,但是此时,一旦发生了PendSV抢占其它IRQ,由于IRQ的“中断现场”被保存到了某个任务中的,那么IRQ恢复运行,就需要内核调度到该任务,这造成了改IRQ的延迟是系统tick周期(而tick周期一般可能设置的比较大,如10ms,甚至100ms)的倍数。 这种延迟很恐怖,会严重影响系统运行效率,甚至导致某个功能异常。例如刚好按键中断优先级设置的比PendSV低,这种延迟下,按键也没法判断了。综上,无论由于处理器的默认配置,要求
PendSV中断优先级必须最低。还是从系统运行效率和正确性上来说,PendSV中断优先级都应该设置为最低。毕竟,我们不能因为使用了RTOS(初衷是为了提高开发效率和代码维护性),反而导致产品的实际功能被RTOS干扰(PendSV中断优先级被配置成比一些功能使用的IRQ优先级更高时)。
2.2 SyStick优先级设置成最低的一些原因:
相比PendSV中断来说,SysTick中断的优先级就灵活很多,设置成高优先级或优先级都是可以的。SysTick中断处理函数中会更新内部“时间计数tick值”,变更一些任务状态等,最后时检查是否需要进行任务切换,需要任务切换的话,设置PendSV中断“挂起”就行了。
但是,SysTick中断服务程序中做的这些工作,都是为FreeRTOS内核做的,并不是直接和我们要实现的功能关联。我们引入FreeRTOS只是为了提高开发效率和代码的可维护性,所以FreeRTOS是作为一个辅助工具(毕竟不用RTOS,直接裸机开发也是可以的)。 因此,如果我们将SysTick的中断优先级设置的比较高的话,由于SysTick周期触发,那么很可能会经常抢占我们自己使用的其它中断(我们自己使用的其它中断,肯定是为了处理一些需要即时响应的工作)。辅助工具的运作,可能会经常打断我们本身功能执行的“重要工作”,这是不合理的。因此,FreeRTOS 默认将SysTick中断设置为最低优先级,这样默认情况下FreeRTOS的运作对系统其它“重要工作”(我们自己使用的IRQ)的影响最小。
SysTick最低优先级可能导致SysTick的中断响应出现延迟,但这对FreeRTOS的正常运作并没有什么关系。如果你的功能依赖高精度的时间,首先考虑的应该是使用额外的硬件定时器来实现(并将其中断设置成高优先级),而不是依赖FreeRTOS提供的一些时间相关API。例如,FreeRTOS提供的软件定时器,虽然它可以满足大部门的应用对定时器的需求,但对于一些需要严格依赖us级时间精度的功能,并不适用(甚至对于一些依赖 低ms级时间精度的功能也不适用)。毕竟软件定时器依赖内核的Tick周期,这就决定了软件定时器能识别的时间粒度。此外,软件定时器还依赖定时器服务任务(或称为daemon task)的优先级(优先级高,该任务才会优先调度,并执行设置的超时回调函数),涉及消息通信,甚至还会被其它软件定时器干扰(另一个超时时间更短的软件定时器超时触发后,在超时回调函数中调用了诸如vTaskDelay等会让当前任务进入阻塞态的API,那么软件定时器服务任务在阻塞期间都不会被内核调度了,这期间超时的定时器都无法即时执行超时回调函数,毕竟运行这些回调函数的定时器服务任务都处于阻塞状态中。所以,不要在软件定时器的超时回调函数中调用会让任务阻塞的API)。
另一种情况是,没有额外的硬件定时器可用了。你复用了FreeRTOS用来产生Tick中断的定时器,(默认)即SysTick定时器。你在SysTick中断服务程序中添加了一些自己的功能代码,并且该功能依赖高精度的时间。这种情况下,你可以根据需要调高SysTick的中断优先级。但是,FreeRTOS中有一个需要注意的点(我使用的内核是官网的V10.4.6,不清楚其它版本有没有考虑这个问题),SysTick中断处理函数中的实现其实并未考虑中断嵌套问题,即它没有考虑SysTick是高优先级,然后抢占低优先级中断的情况。这在Cortex-m3/m4 的SysTick中断处理函数中也有注释:
1 | void xPortSysTickHandler( void ) |
函数最开始的注释,就说明了该中断处理函数是是基于SysTick中断优先级是最低的情况。 这是因为它的屏蔽/打开中断没有考虑,如果SysTick是打断低优先级中断的情况,这种情况下因该使用portSET_INTERRUPT_MASK_FROM_ISR来屏蔽中断,并保存返回的值,恢复中断时应该使用portCLEAR_INTERRUPT_MASK_FROM_ISR,并使用前面保存的返回值。如此,当返回到被打断的低优先级中断服务程序中时,才能保持中断屏蔽状态和被打断前是一样的。(具体可以全局搜portSET_INTERRUPT_MASK_FROM_ISR,看内核时如何使用这个宏的就清楚了)
总结
任务优先级与硬件没有任何关系,这是FreeRTOS自己抽象出来的概念。在FreeRTOS进行任务调度时,总是选择优先级最高的就绪任务来运行。
FreeRTOS的任务调度需要使用硬件中断,涉及SysTIck定时器中断和PendSV中断。
对于PendSV中断,在处理器默认配置下(除了当前正在处理的中断,还有其它中断处于活动状态下时,只能从Handler模式转到Handler模式,不允许直接从Handler模式转到Thread模式),PendSV中断优先级必须设置为最低,否则,PendSV中断就有可能打断其它中断的处理,并在该中断还保持活动的状态下,(PendSV中断处理结束时)直接从Handler模式切换到Thread模式,从而触发异常。
虽然特殊配置下(CCR寄存器的NONBASETHRDENA位设置为 1),PendSV可以在还有其它中断处于活动状态下,直接从Handler模式转到Thread模式,但可能会导致其它IRQ运行效率很低(当PendSV抢占它们时),甚至功能异常(延迟太高,造成功能异常,如按键中断)。所以PendSV优先级设置最低是最好的选择。
另一方面,FreeRTOS只是辅助开发的工具,为了让该工具的运行尽可能少的影响我们实际开发的功能,所以FreeRTOS默认将SysTick,设置为最低优先级,这样可以对系统的其它功能影响最少。当然,如果你完全理解了上文所述的关于中断优先级变高需要做的修改,和会造成的影响,仍旧选择将SysTick优先级变高,这也是可以的,根据你的实际需求来设置即可!
FreeRTOS交流QQ群-663806972