FreeRTOS-使用二值信号量
1 信号量的作用:
信号量的核心功能是用来进行任务间的“事件/信息同步”,使得多个任务可以按照“期望”的顺序进行运行。例如,任务B执行的工作,依赖于任务A的产出结果,那么就需要将任务A运行完成这个“信息”和任务B进行同步。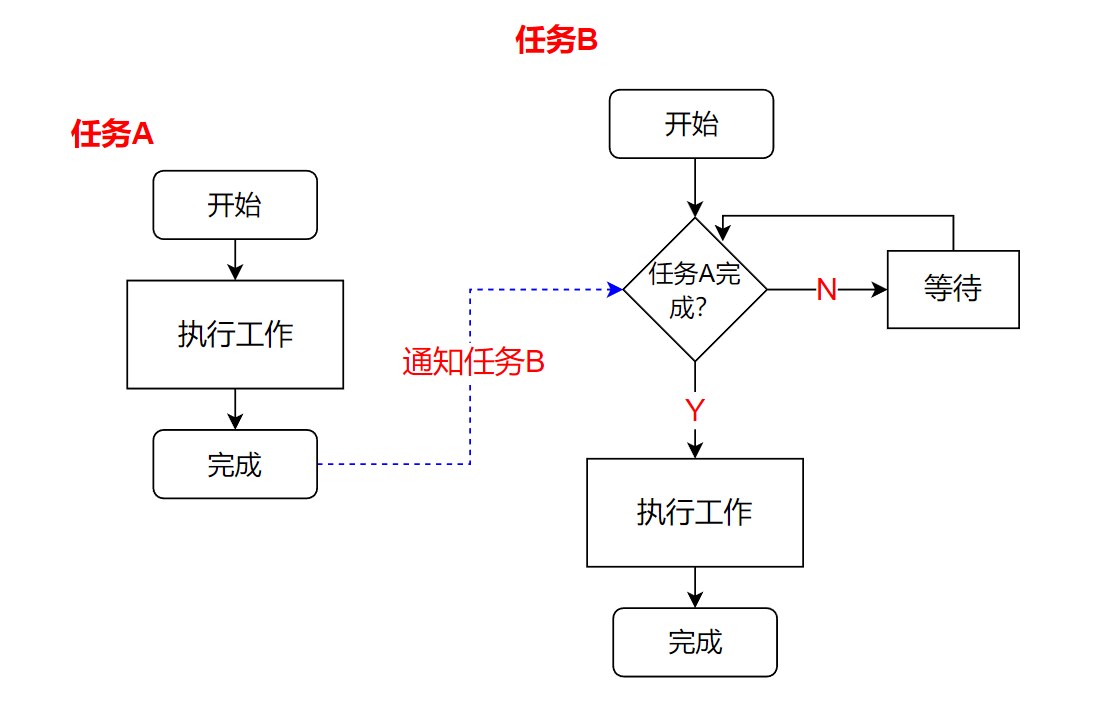
又如,每当按键按下时,任务C 需要针对性的做一些处理工作,这里就需要将按键按下这个“信事件同步给任务C。
因此,信号量存在两种状态。“可用”状态和“不可用”状态。当我们获取某个信号量时,如果信号量当前可用,就可以立刻获取到信号量,否则任务就会进入阻塞状态(取决于是否愿意等待,如果设置了不等待,则立刻返回错误),以等待信号量变为可用。此时如果另一个任务(或中断处理函数)中设置了该信号量,那么等待该信号量的任务就会从阻塞态恢复为就绪态。
以之前的例子解释:任务B每次执行的工作,都依赖于任务A 的产出结果
假设我们创建了一个信号量semaphore(初始状态不可用),那么任务B 运行后就第一件事就是先获取semaphore,此时semaphore不可用(期望的事件还没发生),则任务B进入阻塞态。当某个时刻,任务A运行结束了,则任务A 在结束后设置semaphore(信号量变为可用,将任务A 结束的消息通知给任务B)。之后,由于semaphore变为可用状态,则等待该信号量的任务B 从阻塞状态中恢复为就绪状态,并可以获取到信号量。当任务B也执行完工作后,会再次尝试获取semaphore,由于semaphore已经被消耗了,那么任务B 再次进入阻塞状态,以等待任务A 再一次完成它的工作,并设置semaphore(通知B可以运行)。
代码逻辑如下所示:
1 | TASK_A: |
生活中的红绿灯,是个更直观地解释信号量的例子。当红灯亮时(信号量不可用),汽车不允许通过(任务阻塞了);当绿灯亮时(信号量可用),则恢复运行。
红绿灯这个例子,也隐含了信号量的另一个作用,可以用来对竞争资源进行互斥访问。 十字路口就是竞争资源,任何时刻只能一个方向的汽车通行,当某个方向绿灯了(可以认为这个方向获取到了信号量,可以通行),则另一个方向就是红灯(这个方向没获取到信号量,就不能通行)。但通常开发中,信号量都是用来进行任务间的“信息/事件”同步。对竞争资源的互斥访问,基本都是使用互斥量(mutex)。顾名思义,互斥量 就是用来保证数据的互斥访问,让其任意时刻,只能被一个任务访问。对竞争数据的互斥访问,互斥量除了在语义上比信号量更明确外,互斥量还具有优先级继承特性,相对于信号量更适合做数据的互斥访问。
在文章FreeRTOS-使用消息队列和文章FreeRTOS-消息队列内部细节中,我们学习到了FreeRTOS消息队列的几个特性:
- FreeRTOS的消息队列是多任务安全的,多个任务同时读写消息队列,不会造成消息队列内部状态错误,消息队列模块内部对读/写做了临界区保护。
- 消息队列为空时,任务请求从消息队列中获取消息。如果指定了等待时间,则任务会进入阻塞状态。消息队列收到消息了,或者等待时间超时了,该任务都会恢复为就绪状态。
- 消息队列满时,任务请求向消息队列中发送数据。如果指定了等待时间,则任务会进入阻塞状态,消息队列有空闲位置了,或者等待超时了,任务会恢复为就绪状态。如果不指定等待时间(设置为0),由于队列已经满了,发送消息请求会立刻返回错误。
即,FreeRTOS的消息队列天然具有了信号量要求具备的特性:
不可用状态(即消息队列为空)下尝试获取,会让任务阻塞可用时(有数据了),会自动让等待可用状态的任务,恢复为就绪状态- 多任务同时访问是安全的(信号量会涉及多个任务同时读/写同一信号量,所以需要有多任务访问安全的特性)。
因此,FreeRTOS基于现有的消息队列功能,实现了信号量功能。
2 二值信号量:
二值信号量,是广泛使用的一种信号量。任意时刻,二值信号量,要么是可用状态,要么是不可用状态。
FreeRTOS使用一个长度为1 的消息队列来实现二值信号量。当该消息队列中有消息时,就是信号量可用。当该消息队列中无消息时,就是信号量不可用。
2.1 创建二值信号量
当我们使用API :
1 | SemaphoreHandle_t semaphore = xSemaphoreCreateBinary(); |
创建一个二值信号量semaphore时,就是创建了一个长度为1 的消息队列,并且初始状态,是没有消息的(即信号量不可用)如下图所示:信号量指针semaphore指向一块内存,该内存前面为消息队列的控制区域,之后为存储区,只能存储一个消息。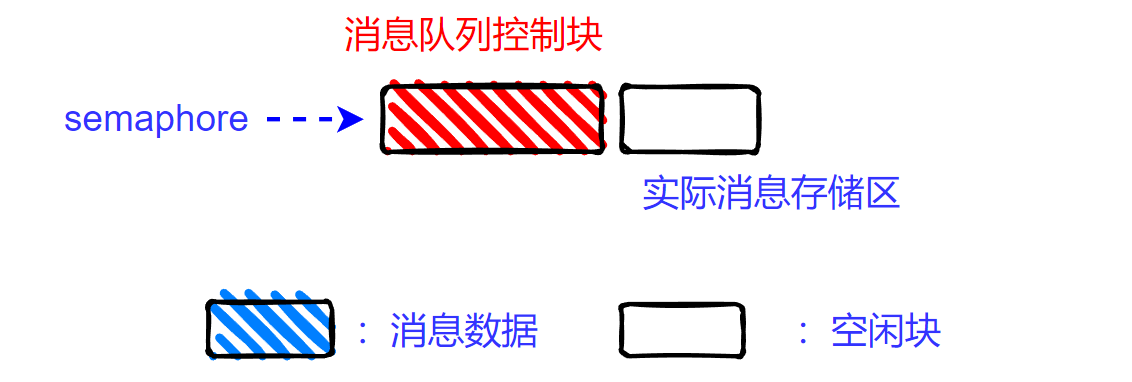
备注:本文为了方便解释,上文以及下文图中表示信号量的消息队列中都有消息存储区。但实际的信号量代码实现中是没有消息存储区的(创建时虽然指定了队列大小n,但内部会将每个消息大小设置为0,因此消息存储区大小 n*0 = 0),因为并不需要存消息数据(也没有消息数据要存),信号量关心的是有没有消息,而不是消息本身。在消息队列控制块中有一个数据成员uxMessagesWaiting ,该成员指明当前消息队列中有几个消息,利用该成员变量即可判断消息队列是否有数据(即消息队列是否可用)。因此,不需要实际的内存来存储消息。
2.2 设置二值信号量为可用状态
信号量创建完成后,默认是不可用状态,即消息队列中是没有消息的。调用API
1 | xSemaphoreGive(semaphore); |
即可将信号量semaphore设置为有效状态,其本质是向表示信号量semaphore的消息队列中“放入了一条消息”。如下图所示(如上文所述,实际是没放消息,只是将内部的消息计数器uxMessagesWaiting加1 了,图中是为了方便解释才画了存有消息):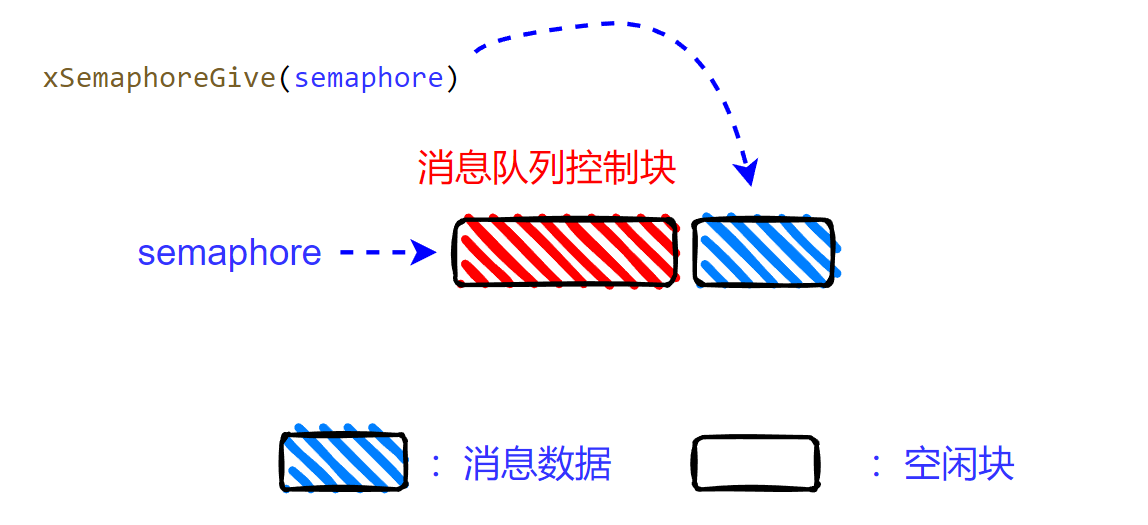
2.3 获取信号量
信号量一旦处于可用状态(其中“存有消息”了),调用
1 | xSemaphoreTake(semaphore, pdMS_TO_TICKS(1000)); |
就能立刻获取到信号量,该函数就会立刻返回。其原理就是从semaphore表示的消息队列中取走了消息(消息取走后,semaphore就会变成不可用状态)。如下图所示(同样,下图中的取走消息是为了说明原理,实际代码中将内部的消息计数器uxMessagesWaiting减1 就行了)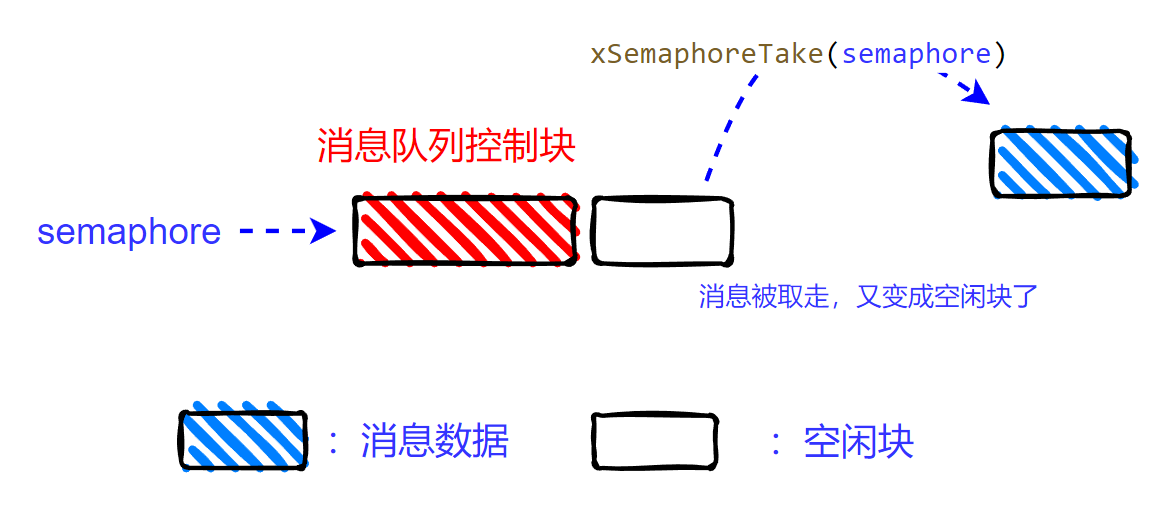
但如果是在semaphore不可用时(即消息队列为空时),调用该api 来获取semaphore,调用该api 的任务会阻塞在该函数内部,直到信号量可用(其它任务或中断函数中设置了信号量,即向消息队列中发送了数据),或者等待时间达到了设定的1 秒超时时间。
3 任务和任务间使用二值信号量进行信息同步
我们以前文的例子来演示二值信号量的使用:我们创建两个任务task_a和task_b。 只有当task_a做完一些工作,task_b才能继续运行。我们使用信号量来对两个任务间的信息进行同步,task_b每次运行前都会先“获取”信号量,信号量不可用时,task_b就会阻塞, 而task_a每次做完工作后,就“设置”信号量,通知task_b可以运行了。
task_a和task_b的代码如下:
1 | void task_a( void *pvParameters ) { |
main函数代码:
1 |
|
运行结果如下所示:task_b 每次在 task_a完成后才会运行。
1 | start FreeRTOS |
4 中断处理函数和任务间使用二值信号量进行信息同步
上面的例子中,信号量的“设置”或“获取”都是在任务代码中,FreeRTOS在中断处理函数中也可以“设置”或“获取”信号量,但需要使用带FromIS后缀的API ,中断处理函数中“设置”信号量可以使用xSemaphoreGiveFromISR,中断处理函数中“获取”信号量可以使用xSemaphoreTakeFromISR。
例如,下面是一个使用信号量,对中断处理函数和任务进行“事件同步”的例子。我们使用按键作为“中断源”,每当按键按下时,设置信号量。任务button_pressed_handler等待信号量(等待按键事件发生),一旦信号量可用,表示等待的“事件”发生了,则做一些相关的工作。
其中,中断处理函数如下所示:
1 | extern SemaphoreHandle_t semaphore; |
处理按键事件的任务代码为:
1 | void button_pressed_handler( void *pvParameters ) { |
Main函数实现为:
1 |
|
运行结果如下所示,每次按键后,就会触发任务button_pressed_handler执行相关工作。
1 | start FreeRTOS |
为什么FreeRTOS中,有两套API分别在中断/非中断环境下使用:
FreeRTOS中的很多API, 可能会使得调用者任务进入阻塞态。但在中断环境中调用这些API 时,因为中断本身是和任务无关的(中断可能在任何时候发生,打断任意的任务),所以中断环境中调用这些API时, 不能让某个任务因此导致进入阻塞状态。因此,如果就使用一套API, 那么就需要在这些API 的内部实现中判断当前的调用环境是不是在中断环境中(在中断环境中和不在中断环境需要执行一些不一样的工作),这无疑为会增加API 内部实现的复杂性,同时也降低的这些API 的执行效率(因为需要做一些额外的环境判断和检查)。
因此,FreeRTOS针对这些API,直接实现了两套API,分别在中断和非中断环境中使用。这样,每套API的调用环境是确定的,内部实现可以更简单,高效。
ps:需要注意文章代码中的日志输出函数,产品代码中如果需要使用的话,需要考虑线程安全性(多任务安全性),因为中断/任务切换可能发生在另一个任务正在输出日志但还未输出完的时候,这就可能造成日志错乱
FreeRTOS交流QQ群-663806972