FreeRTOS-消息队列内部细节
消息队列的使用示例,可以参考FreeRTOS-使用消息队列
消息队列的作用不仅仅是用来进行数据通信,从软件设计上来说,更重要的作用是可以将一个复杂软件系统,划分成多个功能相对独立的模块,各个模块间通过消息队列进行数据传递以实现解耦。如此,一个大的复杂系统,被划分成多个功能清晰明确的更小的子模块,使得软件更易维护。并且,当需要修改某一个子模块的功能时,可以最大程度避免影响其它模块(对于每个子模块来说,数据是通过消息队列过来的,只要数据格式未变动,那么就感知不到数据发送方内部做了什么改动
)。
FreeRTOS的消息队列,需要在创建时指定队列的大小(最大可以同时保留的消息数量)以及消息的大小。如下图所示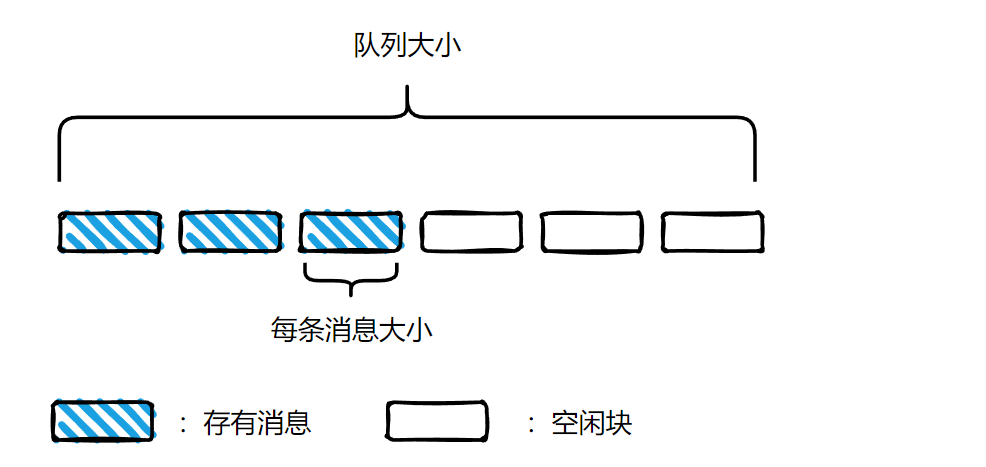
创建消息队列的API为:
1 | QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize ) |
uxQueueLength:队列大小
uxItemSize:队列中每个消息的大小。
返回值:消息队列句柄,用来唯一识别创建的这个消息队列。
xQueueCreate函数返回的消息队列句柄,为一个指针,指向的区域保存了该消息队列的相关信息(队列大小,消息大小,实际消息存储区等)。例如,当我们调用该 API创建消息队列一个消息队列
1 | QueueHandle_t my_queue = xQueueCreate(6, sizeof(struct my_data)) |
实际生成的消息队列在内存组织结构如下图所示: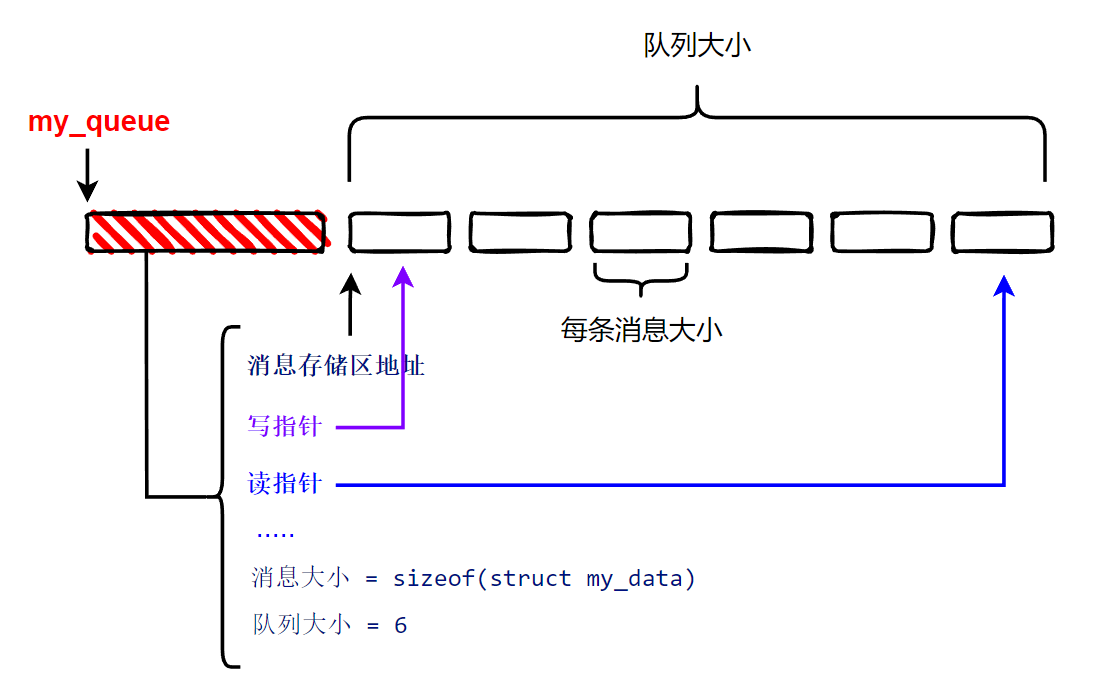
即,内核是直接申请了一大块连续的内存,前面存放这个消息队列的相关信息,随后紧接着就是实际的消息存储区域。消息队列的写指针指向第一个消息(待写入位置),而读指针则指向待读取的消息的前一个消息(读取消息时,内部会先将读指针前进一次,再读)。
消息队列创建成功后,即可通过
1 | BaseType_t xQueueSend( QueueHandle_t xQueue, const void * pvItemToQueue, TickType_t xTicksToWait ) |
推送消息到消息队列中。需要注意的是,虽然第二个参数为指向待发送消息的指针,但内部实际是用指针作为起始地址,然后拷贝uxItemSize(消息大小)个连续字节。即FreeRTOS的消息队列,是直接拷贝了一份数据,而不是仅传递指针。这样的好处是,发送的数据的所有权更明确(由内核管控),而传递指针的话,则需要数据的发送方或接收方在合适的时间释放内存。
数据接收,则通过
1 | BaseType_t xQueueReceive( QueueHandle_t xQueue, void *pvBuffer, TickType_t xTicksToWait ); |
先发送的消息会被先接收到。
上述发送和接收函数都存在第三个参数xTicksToWait。xQueueSend函数中的xTicksToWait ,表示如果当前消息队列中消息存满了,那么就等待其有空闲位置(存在其它地方从消息队列中提取消息了,则会出现空闲位置),等待的超时时间就是xTicksToWait(使用pdMS_TO_TICKS(ms)将时间转换成tick数)。为0表示不等待,立刻返回。
xQueueReceive函数中的xTicksToWait ,表示如果当前消息队列中没有可提取的消息,那么就等待其有消息(当有其它地方向消息队列中发送消息),等待的超时时间就是xTicksToWait(使用pdMS_TO_TICKS(ms)将时间转换成tick数)。为0表示不等待,立刻返回。
当涉及到需要等待一段时间,当前任务(当前调用xQueueSend/xQueueReceive的任务)就会进入阻塞态,之后内核会选择当前系统中优先级最高的就绪任务进行调度,让其运行。
那么,如果超时时间还未到,但消息队列有空闲位置了/有消息了,任务是如何恢复运行的?或者超时时间到了,任务如何恢复运行?
这就涉及到消息队列数据结构中的两个成员:
xTasksWaitingToSend:等待消息队列有空闲位置的任务链表(即,当某个任务在消息队列满时,调用xQueueSend发送消息数据,如果设定了等待时间,那么该任务就会被挂到该任务链表中)。
xTasksWaitingToReceive:等待消息队列有消息的任务链表(即,当某个任务在消息队列为空时,调用xQueueReceive获取消息,如果设定了等待时间,那么该任务就会被挂到该任务链表中)。
如下图所示:(下图只是演示,实际队列不会是又满又空的状态,所以不会出现xTasksWaitingToSend和xTasksWaitingToReceive中都挂有任务)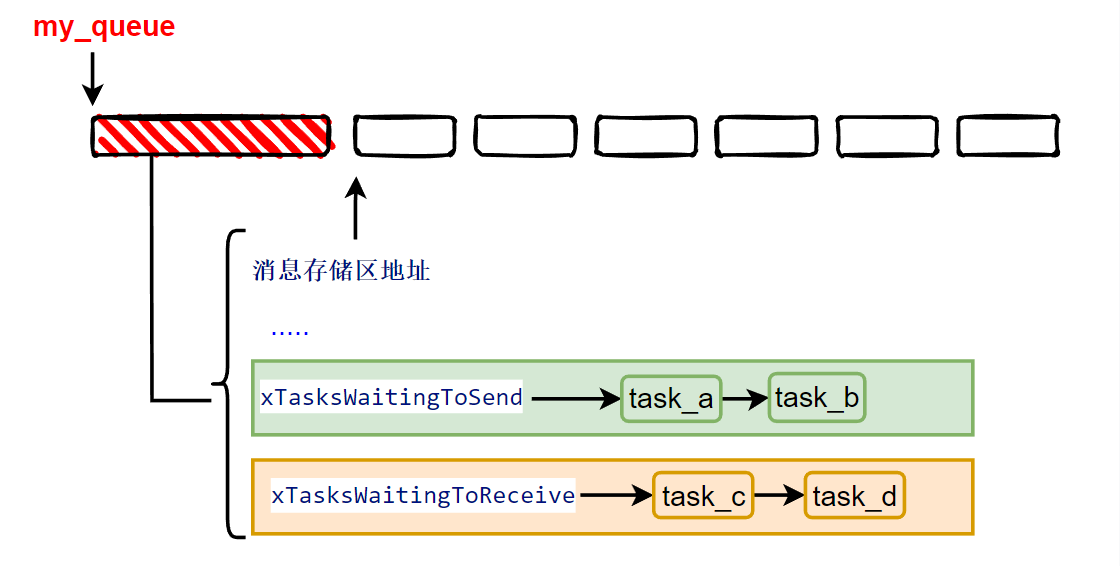
并且,这两个链表是按照任务的优先级排序的,优先级高的任务在链表的前面。这样当消息队列有空闲位置/有数据时,就能直接通知最高优先级的等待任务(链表第一个)。
挂在xTasksWaitingToSend 链表中的任务,都是在等待消息队列有空闲位置可以放下新消息。因此,一旦有其它任务(或中断服务程序)从该消息队列中取走数据了,那么消息队列就会从xTasksWaitingToSend链表中找到第一个最高优先级的任务,让其恢复就绪态(有空闲位置可以发送消息了),如果该恢复就绪态的任务的优先级,是当前所有处于就绪态任务中优先级最高的,那么该任务就能立刻恢复运行。
同理,挂在xTasksWaitingToReceive 链表中的任务,都是在等待消息队列有消息可提取。因此,一旦有其它任务(或中断服务程序)向该消息队列中发送数据了,那么消息队列就会从xTasksWaitingToReceive链表中找到第一个最高优先级的任务,让其恢复就绪态(有消息可以提取了),如果该恢复就绪态的任务的优先级,是当前所有处于就绪态任务中优先级最高的,那么该任务就能立刻恢复运行。
通过消息队列中的xTasksWaitingToSend和xTasksWaitingToReceive 成员,就可以实现消息队列有空闲位置/有消息时及时通知那些等待在该消息队列上的任务。 但另一方面,如果消息队列一直没有空闲位置/没有消息,超时时间到后,任务又如何恢复呢?
原理和上文一样,内核会同时将任务也挂在一个延迟任务链表上,内核会在每个时钟滴答时检查这个链表上的任务是否达到超时时间,达到了,内核就会将其恢复为就绪态。
例如,当我们在任务task_a中调用xQueueSend(my_queue, pdata, pdMS_TO_TICKS(1000))向一个满的消息队列my_queue发送消息,并且设置超时时间为1秒。那么task_a任务会被同时挂到 my_queue的xTasksWaitingToSend任务链表上,以及内核中的DelayedTaskList链表上。如下图所示: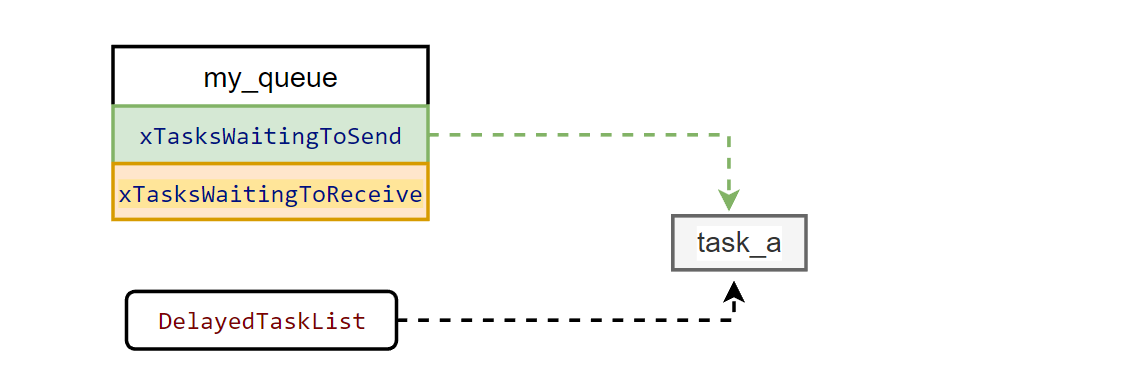
如此,无论是消息队列my_queue有空闲位置可以发送消息了,或者超时时间到期了,任意条件满足时都能立刻通知到等待的任务task_a,让其恢复就绪态,并且当task_a是当前优先级最高的就绪任务时,会立刻得到运行。
FreeRTOS交流QQ群-663806972