FreeRTOS-延后执行机制
嵌入式开发中的一个基本共识是,不能在中断处理函数中做耗时的工作。中断函数中应该只处理最紧急的工作,剩下的工作应该放到线程模式(执行普通代码的模式)下运行。FreeRTOS提供的延后执行功能,就是针对这种需求设计的。
中断机制的存在是为了处理一些紧急请求,如外部数据到来,用户按键等,这些请求都是需要立刻处理的。
如串口数据接收中断,如果我们在串口中断处理函数中提取接收到的数据后,进一步执行更复杂的应用数据分析等工作,那么这段时间内,由于一直处于中断上下文中,其它较低优先级的中断以及当前的串口中断再次发生时,就无法得到及时处理(只有当前中断函数退出后,才会执行其它中断处理函数)。甚至,如果处于中断上下文中的时间太长,会导致丢失掉某些中断事件(期间某个中断A 发生了多次,但无法得到处理,由于硬件上中断悬起标记只有一位,只能表示发生了中断,无法得知发生了几次,那么当前中断结束后,只会调用一次中断A的处理函数。),或者丢失掉一些数据(例如,未使用串口的硬件流控机制时,如果串口中断处理函数耗时太久,cpu不能及时将接收到的数据从串口硬件缓存中提取出来,那么连续发送数据时就会存在丢失的情况)。
因此,实际应用中,中断处理函数中只做一些必要的工作,其它耗时操作会延后到退出中断后再执行。 裸机程序通常会使用一个标记,来表明是否发生了某个中断需要处理。如下图所示: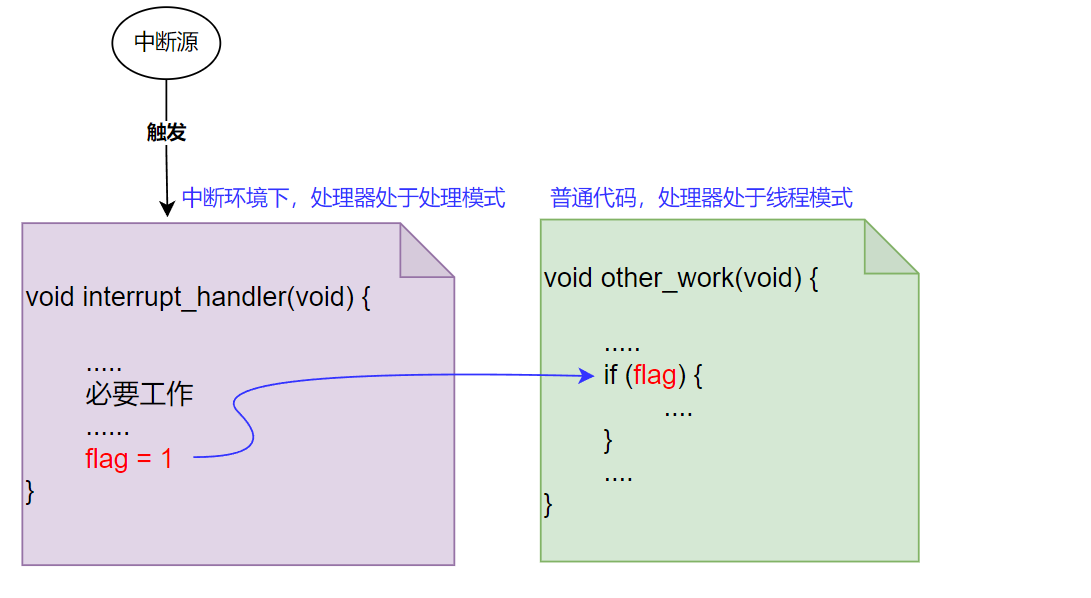
如此,我们既完成了中断触发后,所需要做的所有工作(紧急的工作中断函数中做,次要的延后到退出中断函数后再做)。同时,由于及时退出了中断处理函数,这样就可以尽最大可能避免影响其它低优先级的中断(无论中断优先级高低,处理中断都比普通代码执行的工作更重要,因此应该尽最大可能避免高优先级中断影响低优先级中断)。
但如上文逻辑程序中,使用 flag 标记的方法并不优雅,也不利于维护。
基于RTOS 的实现,一般会单独创建一个任务,用来处理需要延后执行的那些工作。例如在文章FreeRTOS-软件定时器的使用,周期定时器的使用一节中。在实现按键处理时,就是单独创建了一个按键处理任务,并让其阻塞在一个信号量上。而当按键按下,进入中断处理程序,做完必要操作后,会设置这个信号量。如此,等中断函数退出后,按键处理任务由于获得了信号量,就会恢复运行并处理剩下的工作。如下图所示:
这种实现方式逻辑上更清晰,并且使代码更具维护性和扩展性。但存在一个弊端,即需要额外创建任务,信号量等资源。对于一些轻量、中量级的延后处理工作来说,单独为它们创建一个任务并使用信号量这些资源,可能“得不偿失”(在内存紧张的处理器上,更为明显)。
因此,FreeRTOS 针对这种使用场景(即一些工作没必要在中断处理函数中做,但为此单独创建一个任务又浪费资源),提供了一个“延后执行”功能。同样是让非必要工作延后执行,但是基于FreeRTOS内核的“延后执行”功能,我们只需要提供一个执行那些延后工作的处理函数即可,内核会自动帮我们调用该函数。这样可以避免需要单独创建一个任务,并使用信号量进行事件同步。
使用FreeRTOS的延后执行功能:
FreeRTOS提供的延后执行功能,基于FreeRTOS提供的 软件定时器模块实现,因此需要使能FreeRTOS的软件定时器功能(软件定时器的使用和相关实现原理可以参考:FreeRTOS-使用软件定时器,FreeRTOS-软件定时器实现原理)。并且,还需要在工程配置文件FreeRTOSConfig.h 中添加如下宏定义:
1 |
实际上,FreeRTOS提供的“延后执行”功能,概念上来说和软件定时器模块并没有关系。但是由于软件定时器模块的实现中存在一个 软件定时器服务任务,该任务从一个软件定时器模块专用消息队列中,获取软件定时器相关的命令,并进行处理。 因此,FreeRTOS直接复用了这一套现成的机制,新增了一个命令EXECUTE_CALLBACK,并让定时器服务任务在收到这个命令时,调用“延后执行”函数。因此,需要延后执行的工作,实际是在软件定时器服务 任务中作为一个回调函数运行的。其整体逻辑如下图所示:
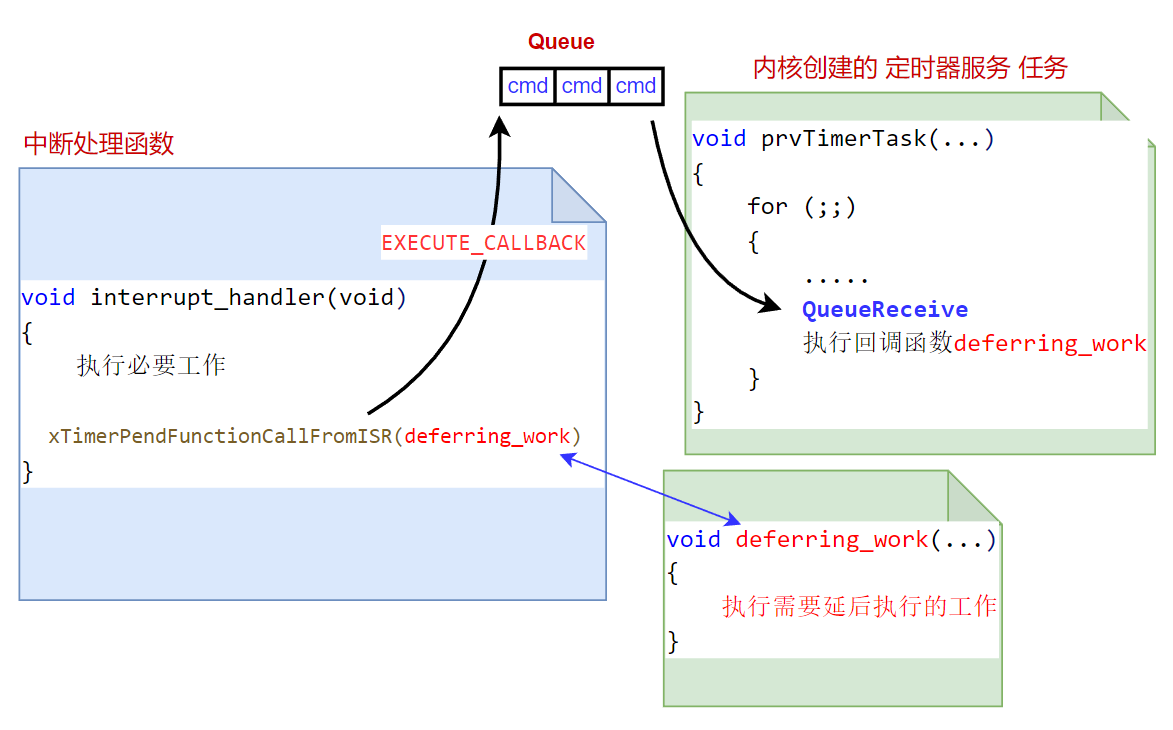
其中,可以延后执行的工作,我们放在 deferring_work 函数中执行。
中断处理程序中只做必要工作,之后调用API:xTimerPendFunctionCallFromISR函数,将需要延后执行的函数作为参数传入。该API 的内部实现是 将deferring_work函数+EXECUTE_CALLBACK命令 封装成一个消息体,发送到软件定时器模块专用消息队列中。
而软件定时器服务任务,会从消息队列中提取消息,判断为EXECUTE_CALLBACK命令后,则执行和命令一起传过来的延后执行函数 deferring_work。
整体过程就是如此。使用的API 具体定义为:
1 | BaseType_t xTimerPendFunctionCallFromISR( PendedFunction_t xFunctionToPend, |
xFunctionToPend:即需要延后执行的函数。
该函数的原型定义为:typedef void (* PendedFunction_t)( void *, uint32_t );
即函数无返回,并且有两个参数。pvParameter1和ulParameter2: 为自定义使用的参数。
这两个参数是和xFunctionToPend函数以及EXECUTE_CALLBACK命令一起发送到消息队列中的,当软件定时器服务任务实际执行xFunctionToPend函数时,会提取这个两个参数,并传给xFunctionToPend函数pxHigherPriorityTaskWoken:该参数的解释见下文的演示例子。
注意,该函数带有FromISR后缀,表示为中断环境中使用的API。普通线程模式下,也可以使用FreeRTOS提供的延后执行函数,只是使用的是不带FromISR后缀的API:xTimerPendFunctionCall
最后,我们以一个具体的例子来演示FreeRTOS“延后执行”功能的使用,简单起见,我们实现一个按键翻转LED灯功能。
按键中断处理函数中只做必要的中断源清除,以及按键判断工作,LED翻转则延后执行。
延后执行函数:实现LED翻转
1 | void deferring_work(void *parameter1, uint32_t ulParameter2) { |
按键中断处理函数:清除中断源,判断按键,之后将需要调用api 推送需要延后执行的函数。
1 | void GPIOTE_IRQHandler(void){ |
上述代码中,在中断处理程序最后使用了portYIELD_FROM_ISR。这是因为在中断处理程序中使用xTimerPendFunctionCallFromISR,实际是向软件定时器模块专用消息队列发送了一个消息(deferring_work函数+EXECUTE_CALLBACK命被封装在一个消息中)。这会让阻塞在该消息队列上的软件定时器服务任务(阻塞中,在等待消息队列有消息)恢复就绪态(有消息了,解除阻塞,恢复就绪态,如果恢复为就绪态的任务优先级比当前任务的优先级更高,则 higher_task_woken 会被自动设置为pdTRUE)。如果当前任务(被按键中断打断的任务),其优先级比恢复就绪状态的软件定时器服务任务低,由于我们使用的是抢占式调度的实时操作系统,当存在比当前任务优先级更高的任务就绪时,应该让其立刻被调度,而portYIELD_FROM_ISR的作用就是如果存在更高优先级任务就绪了,就会设置任务切换中断(PendSV中断),这样在中断服务程序GPIOTE_IRQHandler结束后,就会立刻触发任务切换,使得更高优先级的就绪任务被调度运行。
最后的 main函数,我们不创建任何自定义的任务(内核会自动创建一个idle任务,使用软件定时器后,内核也会创建一个 软件定时器服务任务prvTimerTask),直接启动内核调度即可。
1 |
|
ps:需要注意文章代码中的日志输出函数,产品代码中如果需要使用的话,需要考虑线程安全性(多任务安全性),因为中断/任务切换可能发生在另一个任务正在输出日志但还未输出完的时候,这就可能造成日志错乱
FreeRTOS交流QQ群-663806972