FreeRTOS-软件定时器的实现原理
FreeRTOS的软件定时器实际使用,可以参考:FreeRTOS-软件定时器的使用
1 软件定时器的整体逻辑
FreeRTOS的软件定时器不依赖于任何额外的硬件定时器,完全由内核通过软件来实现的。
使用FreeRTOS 的软件定时器(timer),需要在工程中包含 FreeRTOS/Source/timers.c文件,并且在FreeRTOSConfig.h文件中添加宏:
1 |
一旦配置了宏configUSE_TIMERS = 1,在调用 启动内核调度API:vTaskStartScheduler时,该函数内部会创建一个名为xTimerQueue的消息队列和一个名为prvTimerTask的定时器服务任务(timer.c文件中):
1 | void vTaskStartScheduler( void ) { |
- xTimerQueue:为软件定时器模块专用的消息队列。
- prvTimerTask:软件定时器服务任务,该任务创建后,就会一直存在。该任务会从消息队列xTimerQueue中提取消息,并处理消息中包含的软件定时器相关命令
调用FreeRTOS的软件定时器相关API时,实际是发送了相关的命令到消息队列xTimerQueue中(例如,调用xTimerStart启动某个定时器时,实际是将 start命令和要启动的定时器句柄,封装成一个消息体,并发送到消息队列xTimerQueue中。 ),prvTimerTask任务则从消息队列xTimerQueue中提取消息,解析相关命令并执行对应处理。
如下图所示:在自定义任务app_task中,使用软件定时器API xTimerCreate创建一个软件定时器,该函数会返回一个用来识别当前创建的这个定时器的句柄 timer_A,当我们调用 xTimerStart 启动定时器 timer_A时,函数内部实际是将START命令 和 定时器句柄timer_A封装成一个消息体,并放入定时器服务专用的消息队列 xTimerQueue中,而定时器服务任务prvTimerTask则从该消息队列中提取消息,并根据消息中的命令执行相应的动作。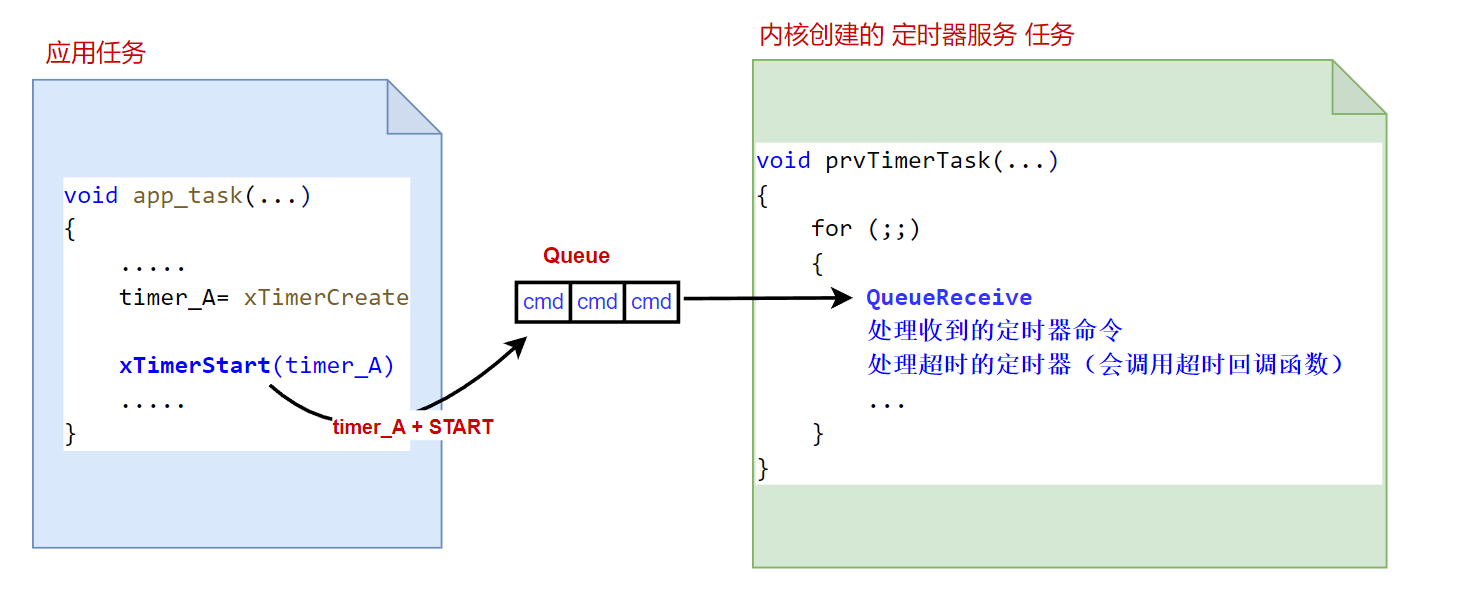
为什么需要这种分离式的架构(为什么弄一个独立的定时器服务任务)? 软件定时器提供了一种延后执行的功能,可以在未来某个时间执行某个动作。所以需要有相关的数据结构来维护这些信息(记录哪些时间点会有某个定时器超时,以及超时要执行的动作)。
这些数据结构和功能直接在内核代码中实现也是可以的,但是软件定时器并不属于内核必备功能(任务调度,时间的感知就属于内核必备功能),所以FreeRTOS将其抽离出来,单独实现在Timer.c文件中,做成一个可选功能(对于资源受限设备,并且不需要软件定时器功能时,去掉改功能可以节省ROM和RAM资源)。如果应用需要使用软件定时器时,内核启动时就会自动创建一个TimerTask任务来处理所有软件定时器相关的工作。
因此,我们自定义的任务需要调用软件定时相关API时,就需要和TimerTask任务进行通信,FreeRTOS中任务间通信,可以通过消息队列来实现。当然,这些通信的实现,FreeRTOS已经封装好了(即调用API时,API内部自动封装相应的消息体,并发送到消息队列中)。
2 内核如何实现在设置的超时发生后,调用设置的回调函数
下文涉及到内核中的多个任务队列,如果不了解,可以先参考这篇文章FreeRTOS的任务调度和管理
软件定时器模块维护了一个 定时器链表 TimerList,基于内核的链表数据结构实现。当调用xTimerStart启动一个定时器时, api内部会将 start命令+要启动的定时器 封装成一个消息体发送到到消息队列中,而软件定时器服务任务TimerTask则从消息队列中提取消息体,并将其中的定时器插入到定时器链表 TimerList中。大致如下图所示: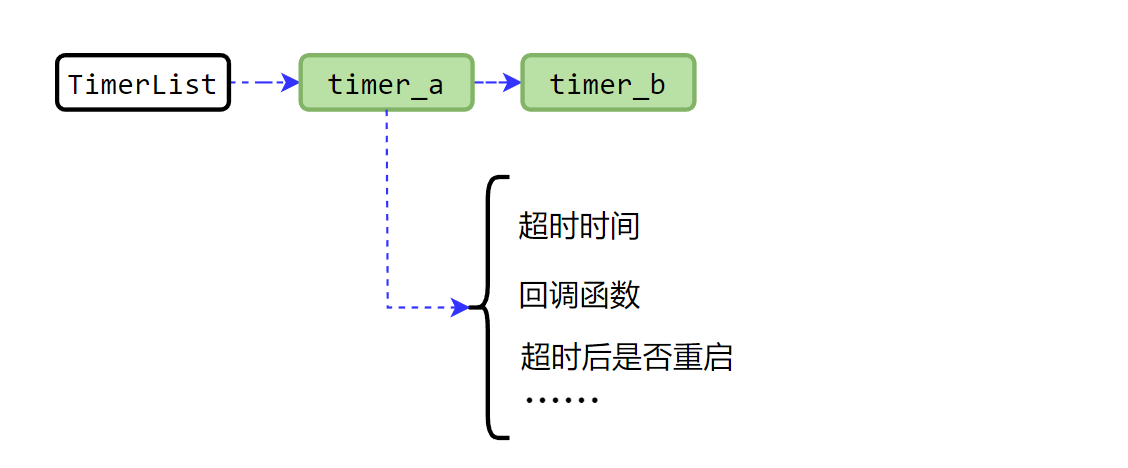
定时器链表TimerList 中的每一项,维护了一个定时器的相关信息(定时器的超时时间,超时后需要调用的回调函数等)。并且,该链表是按照 定时器的超时时间 递增排序的。这样,每次判断超时时间是否到达时,只需要判断第一个即可,如果第一个定时器还未超时,则后面的均未超时。
在后台常驻的定时器服务任务prvTimerTask,会通过该链表来判断是否有定时器超时。
定时器服务 任务的大致代码逻辑如下:
1 | void prvTimerTask( void * pvParameters ){ |
其中:
prvGetNextExpireTime:该函数内部会查询定时器链表的第一项,获取其中的定时器超时时间。返回值
xNextExpireTime,即链表中第一个定时器的超时时间,xListWasEmpty返回当前定时器链表是否为空(为空,则表示当前没有正在运行的定时器)。prvProcessTimerOrBlockTask:该函数内部会根据是否存在定时器,以及定时器是否超时等情况,执行不同的处理过程。
情况1:如果上一步获得的
xListWasEmpty=pdTRUE,即当前没有正在运行的定时器,那么该函数中就会一直阻塞(即软件定时器服务任务prvTimerTask阻塞),直到消息队列xTimerQueue收到消息。这是通过将当前任务(prvTimerTask)从就绪队列中移除,并挂到消息队列的
xTimerQueue的等待消息任务链表上(xTimerQueue的成员xTasksWaitingToReceive)。其过程如下图所示:
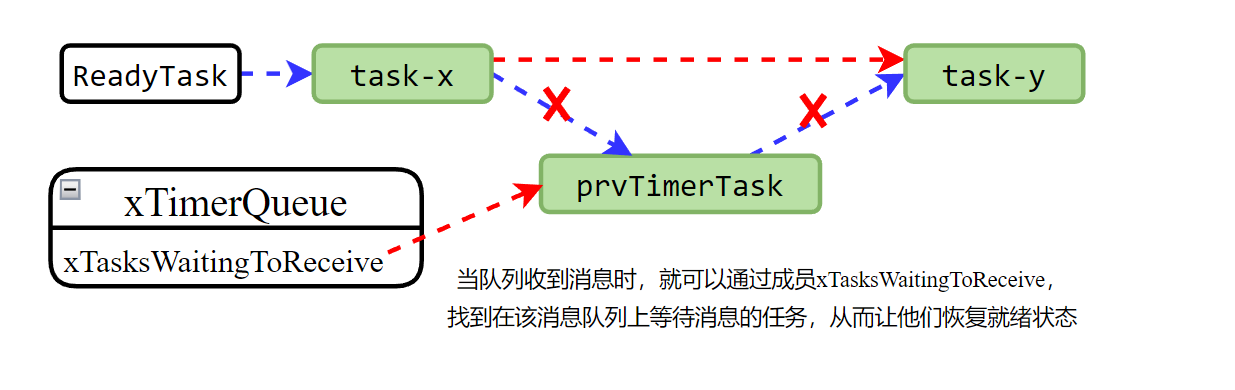
这样,当消息队列xTimerQueue中有数据时(有新的定时器相关命令),就会可以通过xTasksWaitingToReceive成员,直接找到任务prvTimerTask,并使其恢复就绪状态。情况2:如果
xListWasEmpty=pdFALSE,即当前有正在运行的定时器存在,并且当前时间(内部通过xTaskGetTickCount()获得系统当前“时间”)已经大于上一步获得的xNextExpireTime,则表明定时器链表中的第一个定时器已经超时了,那就就会调用定时器的超时回调函数。在函数prvProcessTimerOrBlockTask内部,会调用prvProcessExpiredTimer来处理超时的定时器,代码逻辑大致如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31void prvProcessTimerOrBlockTask( const TickType_t xNextExpireTime, BaseType_t xListWasEmpty ) {
....
// 获取当前时间
xTimeNow = prvSampleTimeNow( &xTimerListsWereSwitched );
// 定时器链表不为空,且第一个定时器的超时时间到达了
if( ( xListWasEmpty == pdFALSE ) && ( xNextExpireTime <= xTimeNow ) )
{
...
// 处理超时
prvProcessExpiredTimer( xNextExpireTime, xTimeNow );
}
....
}
// 处理超时内部实现
void prvProcessExpiredTimer( const TickType_t xNextExpireTime, const TickType_t xTimeNow ) {
// 超时的是定时器链表中的第一个定时器,获取它
Timer_t * const pxTimer = ( Timer_t * ) listGET_OWNER_OF_HEAD_ENTRY( pxCurrentTimerList );
// 已经超时了,将其从定时器链表中移除
( void ) uxListRemove( &( pxTimer->xTimerListItem ) );
// 如果这个定时器时周期性的定时器,那么超时后,需要重置它,让它再次开始计时。内部会将其再次插入到定时器链表TimerList中
if( ( pxTimer->ucStatus & tmrSTATUS_IS_AUTORELOAD ) != 0 )
{
prvReloadTimer( pxTimer, xNextExpireTime, xTimeNow );
}
...
// 调用创建定时器时设置的回调函数。
pxTimer->pxCallbackFunction( ( TimerHandle_t ) pxTimer );
}情况3:如果
xListWasEmpty=pdFALSE,即当前有定时器存在,但是当前时间(内部通过xTaskGetTickCount()获得系统当前“时间”)小于上一步获得的xNextExpireTime,则表明现在没有定时器超时。那么,当前函数prvProcessTimerOrBlockTask就会阻塞(即prvTimerTask任务阻塞),直到到达超时时间xNextExpireTime,或者消息队列xTimerQueue收到消息。
实现原理同上,只是这里不仅将任务prvTimerTask挂到消息队列xTimerQueue的等待消息任务链表上(xTimerQueue的成员xTasksWaitingToReceive),同时还会挂到内核的DelayedTaskList链表(延迟任务队列)上。如下图所示: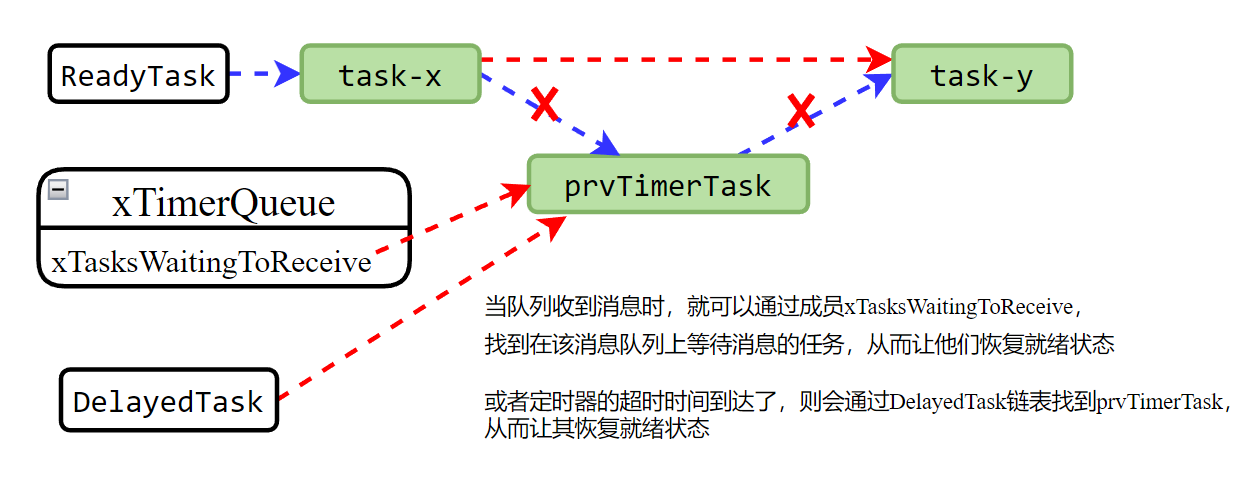
这样无论是定时器超时时间到达了,还是消息队列收到新消息了(定时器相关命令),任务都能恢复就绪状态,来处理超时的定时器,或处理新接收到的定时器命令。
prvProcessReceivedCommands:检查消息队列
xTimerQueue中是否有消息,有就提取处理,没有就立刻返回。
总结:
最后,再总结一下定时器工作的流程。
当我们在工程中配置了使用软件定时器,在main函数中调用启动内核调度api:vTaskStartScheduler后,内核就会自动创建软件定时器需要的资源,如软件定时器专用消息队列xTimerQueue,软件定时器服务任务prvTimerTask,软件定时器链表TimerList等。
当我们没有实际启动定时器时,即当前系统中没有正在运行的定时器。软件定时器服务任务prvTimerTask在运行后,调用prvGetNextExpireTime函数,查询定时器链表TimerList发现当前没有在运行的定时器,(进入prvProcessTimerOrBlockTask函数后)prvTimerTask任务就没有工作需要处理,那么就会将自己挂载到消息队列xTimerQueue的等待消息任务链表上(进入阻塞态),直到消息队列中有数据到来。—–(此时是阻塞在prvProcessTimerOrBlockTask函数内部)
某个时刻,在自定义任务A 中我们调用了xTimerStart来启动定时器timer_A,就会将 start命令+定时器timer_A 打包成消息体,发送到消息队列xTimerQueue中,消息队列收到消息后,检查到prvTimerTask任务在等待消息,则让prvTimerTask任务恢复就绪态。此时,如果prvTimerTask任务的优先级大于自定义的任务A,prvTimerTask任务就会立刻得到运行(抢占式调度)。 prvTimerTask任务恢复运行后(从prvProcessTimerOrBlockTask函数中恢复运行,并退出函数后),(进入prvProcessReceivedCommands函数中)从消息队列中提取消息,并将定时器timer_A插入到定时器链表上。—–(退出prvProcessReceivedCommands函数)
之后,prvTimerTask任务再次调用prvGetNextExpireTime函数,获取定时器链表中第一个定时器的超时时间,再次进入prvProcessTimerOrBlockTask函数中。此时,如果超时时间小于系统当前“时间”,那么就是超时了,就会执行超时回调函数。 否则,还未超时,就会将任务prvTimerTask同时挂到内核延迟任务队列 DelayedList,和消息队列xTimerQueue的等待数据任务链表上。这样无论是超时时间到达了,还是有新命令发送过来,prvTimerTask任务都能恢复就绪状态,继续处理后续过程。
FreeRTOS交流QQ群-663806972