FreeRTOS-内核中的钩子(Hook)函数
1:什么是钩子函数?
钩子函数的本质可以看做是回调函数,例如在Linux上开发时,时常需要处理一些系统信号(signal),那么就需要调用系统API 注册信号处理函数(回调函数)。如此,当系统发生信号时,就会调用注册的信号处理函数,这种方式是在代码的运行过程中,通过调用 API 动态注册回调函数实现的。
FreeRTOS中,实现钩子函数的方式更简单直接,直接实现定义好的固定函数名字的 Hook 函数即可。如下图所示,实现vApplicationIdleHook 钩子函数就是配置一个宏,然后实现这个函数具体内容: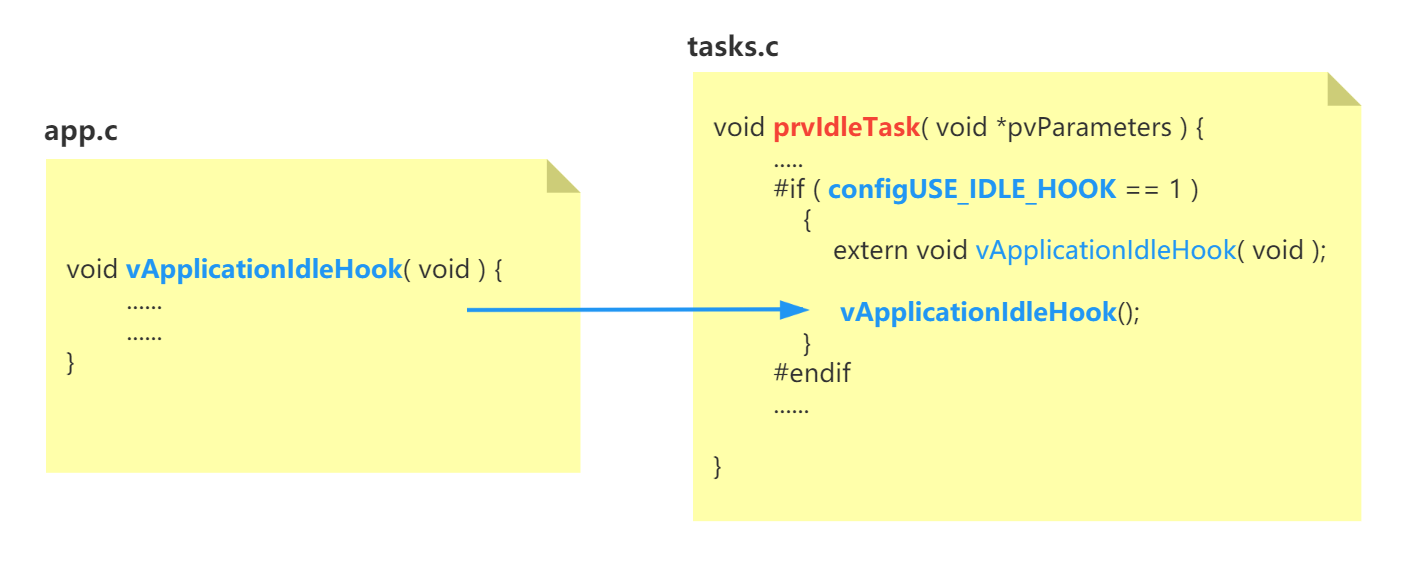
FreeRTOS提供的几个钩子函数是定义好函数名和参数形式的。例如,FreeRTOS中的 idle hook函数,当内核没有其它任务运行时,内核就会运行内核自己创建的 idle 任务,idle任务中会运行 idle hook 函数。当然,运行的前提是,我们要在FreeRTOSConfig.h文件中定义 configUSE_IDLE_HOOK,之后再实现函数 void vApplicationIdleHook( void ) 的具体内容,函数名和参数形式都是固定的,不能改变。这种方式可以看成是静态注册,即在代码的编译阶段,就将对应的 Hook 函数注册好了。
2:FreeRTOS中提供的几个钩子函数
2.1:Idle Hook Function
使用 idle hook 函数,需要在FreeRTOSConfig.h文件中定义 configUSE_IDLE_HOOK,并在工程中实现 void vApplicationIdleHook( void ) 函数的具体内容。
FreeRTOS在内核在启动调度程序时,会自动创建一个 idle 任务。该任务的优先级默认是0,即最低优先级。当系统中没有其它更高优先级的任务时,FreeRTOS内核就会选择 idle任务 运行(如果存在其它优先级也为0 的任务,默认是轮流调度)。idle 任务的大致流程如下:
1 | void prvIdleTask( void *pvParameters ) { |
idle 任务主要是做三件事:
调用
prvCheckTasksWaitingTermination来释放一些被删除任务的内核资源。FreeRTOS提供的vTaskDelete( TaskHandle_t xTaskToDelete )是可以删除某个任务的,删除任务就会释放相关的内核资源(内核任务控制块,任务栈空间),如果调用 vTaskDelete(NULL),就是自己删除自身,一个任务是无法删除自身的,所以FreeRTOS会将那些调用vTaskDelete(NULL)删除自己的任务挂到等待删除任务队列上。prvCheckTasksWaitingTermination做的事情,就是检查等待删除任务队列上是否有需要删除的任务。更详细的信息可以参考:FreeRTOS的任务调度和管理
调用 idle hook 函数
一些低功耗相关的处理
如上所述,我们实现的 void vApplicationIdleHook( void ) 函数,就是在 idle 任务中运行的。
idle任务是当前没有更高优先级的任务在运行、或处于就绪状态时,内核才会调度 idle 任务。可以认为idle 任务运行时,系统基本处于空闲状态(其高优先级任务应该全部处于阻塞态,或挂起态,否则不会运行最低优先级的任务)。
所以,vApplicationIdleHook是放置低功耗相关代码的理想位置。如果,系统对功耗有要求,可以在该函数中关闭相关耗电外设,然后执行 WFI 让CPU进入休眠降低系统功耗,将相关外设的重新打开代码放在WFI 指令之后,使得CPU在被唤醒后可以恢复相关外设功能。
(实际上,idle函数中与配置configUSE_TICKLESS_IDLE相关的代码,也做了低功耗的处理,并且考虑的更全面,但并不是所有平台都支持。)
一个需要注意的问题是:绝对不要在vApplicationIdleHook函数中调用会让任务阻塞的FreeRTOS API ,例如, 调用vTaskDelay 让任务延迟一会,或者等待诸如消息队列这样的资源,并设置了超时时间(设置了超时时间,当资源不可用时,就会让任务处于阻塞)。
这个问题的本质与FreeRTOS内核的实现方式相关。你可以测试一个如下的例子:创建一个优先级为 1 的任务,输出调试信息。实现vApplicationIdleHook 函数,同样输出调试信息,并且也调用了vTaskDelay(这会让调用vApplicationIdleHook函数的 idle任务阻塞)。 代码中的输出函数可以替换成自己的串口输出,或者参考这篇文章使用J-Link RTT:使用JLink-RTT输出调试信息
1 | void test_task( void * pvParameters ) |
此外,在FreeRTOSConfig.h文件中,定义configASSERT(X), 参数为出现错误的文件和行号,如下所示:
1 | extern void vAssertCalled( const char * pcFile, uint32_t ulLine ); |
vAssertCalled 函数内部实现输出具体信息:
1 | void vAssertCalled( const char * pcFile, uint32_t ulLine ){ |
实现上述代码,编译烧录后运行,你可以看到类似下面的调试信息(不同的内核版本,可能报错的行数不一样。):
根据调试信息,可以定位到系统是在进行任务切换时,选择当前最高优先级的就绪任务时出错了。
具体原因如下:当前系统只有 2 个任务,一个是主动创建的 test_task任务,优先级为 1;一个是内核调度启动时自己创建的 idle 任务,优先级为 0。
当内核运行起来后,会先运行优先级为 1 的test_task任务。test_task输出”in test task”,之后由于调用vTaskDelay,进入阻塞态。
内核此时进行任务切换,由于只有 idle 任务处于就绪态了,内核选择idle 任务运行。 idle 任务运行后会调用vApplicationIdleHook,输出 “in application hook”,之后同样因为调用vTaskDelay,进入阻塞态。
内核此时再次进行任务切换,但此时没有任务可以运行了!FreeRTOS的内核实现中是不支持这种状态的!
所以:绝对不要在vApplicationIdleHook函数中调用会让任务阻塞的FreeRTOS API !
另一个需要注意的点是,vApplicationIdleHoo 中不要实现无限循环,因为调用vApplicationIdleHoo 的 idle 任务有清理待删除任务所占内存资源的功能,如果你的系统中有任务会删除自己,并且vApplicationIdleHoo 内部又是无限循环,那么函数就无法退出,idle 任务就不能执行释放待删除任务所占资源的那部分代码。
2.2 Tick Hook Function
使用 Tick HooK 函数需要在FreeRTOSConfig.h文件中定义
1 |
并且实现函数 void vApplicationTickHook( void )的具体内容。
关于 FreeRTOS的 tick中断,可以参考这里:FreeRTOS-内核对时间的测量。
tick 钩子函数就是在每次 tick中断 发生后被调用,cortex-m处理器上使用 systick 定时器来产生 tick中断,在systick定时器的中断处理函数中会调用 xTaskIncrementTick ,该函数内部就会调用 tick hook 函数: vApplicationTickHook 。例如,实现一个如下的简单输出调试信息的 tick hook 函数,烧录到开发板上运行后,就可以在不停输出调试信息。
1 | void vApplicationTickHook( void ) |
需要强调的是,vApplicationTickHook是在中断处理函数中被调用的。因此,我们实现vApplicationTickHook 的具体内容时,不应该做一些耗时操作,并且不能调用没有 FromISR 后缀的 FreeRTOS API(FreeRTOS中很多函数有两个版本,有 FromISR 后缀的才能在中断环境中调用。即使是带是FromISR后缀的API,也只能在硬件中断优先级低于configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 的中断中调用,否则可能会破坏在临界区中操作的内核数据结构)。
如果你有一个“简短的” 周期性任务,并且其运行频率基本和内核运行频率一致,那么就可以将其实现在 tick hook 函数中。(需要注意的是,如果设置了configUSE_TICKLESS_IDLE,FreeRTOS会根据系统状态来决定是否要跳过几个 tick中断,保持更长时间的连续休眠,从而节省功耗)
2.3 Malloc Failed Hook Function
使用 Malloc Failed Hook 函数需要在FreeRTOSConfig.h文件中定义
1 |
并且实现函数 void vApplicationMallocFailedHook( void )的具体内容。
malloc failed hook 函数就是在内存申请失败时,调用我们实现的 vApplicationMallocFailedHook 函数。在FreeRTOS提供的动态内存分配文件 heap_x.c (x=1、2、3、4、5)中,实现了pvPortMalloc API 来申请内存,如果申请失败了,就会调用vApplicationMallocFailedHook。
该钩子函数用处不大,因为调用pvPortMalloc 的返回值为NULL时,就是告诉我们内存申请失败了。不过,可以在开发阶段使用,直接在vApplicationMallocFailedHook 函数中输出内存不够的调试信息,这样可以避免在每个调用pvPortMalloc的地方去根据返回值,输出调试信息。
2.4 Stack Overflow Hook Function
使用 栈溢出检测钩子函数,需要在FreeRTOSConfig.h文件中定义 configCHECK_FOR_STACK_OVERFLOW(有两种定义的值,代表两种检测模式,后面解释),并且实现函数:
1 | void vApplicationStackOverflowHook( TaskHandle_t xTask, signed char *pcTaskName ) |
其中,xTask为FreeRTOS中的任务句柄(用来识别一个任务),在成功创建一个任务时,内核会返回被创建的这个任务的句柄, pcTaskName 为创建任务时,设置的任务名。任务创建可以参考:FreeRTOS 创建任务.
栈溢出检测钩子函数,其目的就是为了检测任务栈是否溢出,如果溢出了,就会调用实现的vApplicationStackOverflowHook,并传入任务句柄,和任务名,方便定位是哪个任务发生了栈溢出。
FreeRTOS将任务的栈溢出检测,放在了任务切换中,当目前正在运行的任务被换出时,检测一下它是否有栈溢出。官方给的理由是任务在被换出时,需要在任务栈中保存上下文信息(这样后面再次被调度时才能恢复),这时任务栈可能达到最深。当然,这只是可能。)
FreeRTOS有 2 种栈溢出检测方式:
当定义 configCHECK_FOR_STACK_OVERFLOW 为 1 时,栈检测的方式就是看当前栈指针,有没有超过栈范围。只要栈顶指针所指的地址,没有超过栈空间的边界,那么就算作没溢出。
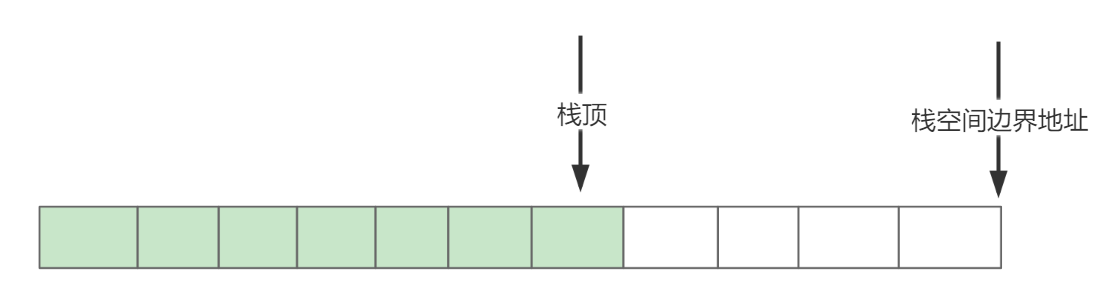
这种检测方式很快,只要比较一下地址就可以了。但这种检测方式是基于 任务被换出时,任务的栈地址达到最深。实际上,任务可能是被换出之前达到最深。例如下面这种例子:1
2
3
4
5
6
7
8
9void fun_a(void) {
char array[1000];
.....
}
void task_a( void * pvParameters ) {
...
fun_a();
...
}任务 task_a自己没有定义局部的大数组,但是调用了函数 fun_a,函数fun_a 中申请了一个大的临时数组(占用栈空间),那么此时任务调用 fun_a 时会达到任务栈的最深。假设任务 task_a 退出fun_a后(char array[1000]被销毁了,不占空间了),发生了了任务切换,任务task_a 被换出去,那么此时看到的栈顶指针就不是最深时候的了。如果之前发生了栈溢出,此时就检测不到了,那么系统后续运行就可能不正常了(之前的栈溢出可能已经覆盖了某些任务的内核控制块信息,或者是栈信息)。
当定义configCHECK_FOR_STACK_OVERFLOW 为 2 (大于1即可)时,FreeRTOS在创建任务时,会将任务栈空间都设置成一个特殊的初始值(0xa5)。当任务被换出时,内核检查栈的最后16个字节还是不是0xa5,如果不是,说明曾经栈最深时,达到过这里,所以被其它值覆盖了,那么就判定任务栈溢出了。
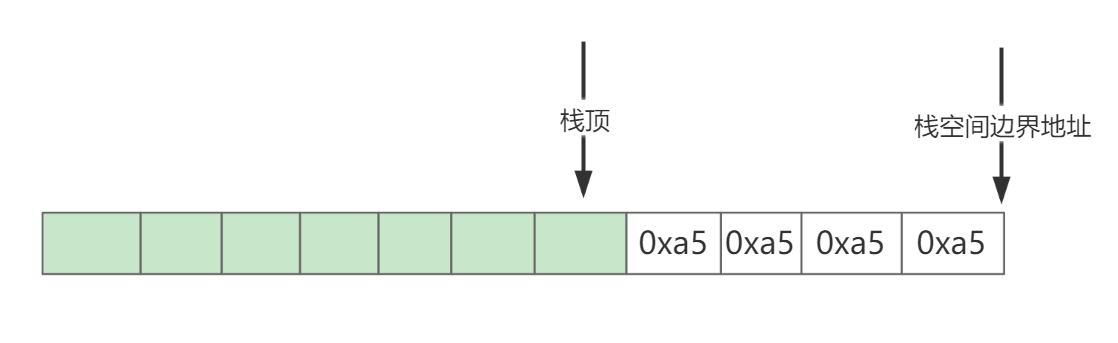
相比第一种检测方式,只能检测被换出的那个时刻栈有没有溢出。第二种检测方式可以检测到任务在之前的运行过程中,有没有发送过栈溢出。(但这种方式也不是说百分百,如果发生栈溢出时,覆盖了最后16个字节,但覆盖值刚好就是0x5a,不就可以骗过去了,不过基本不用考虑这种特殊的小概率事件)
需要注意的是:栈溢出的检测最好只在开发阶段进行测试,正式发布的代码最好不要包含该动能,会影响任务切换时的效率(任务切换发生在中断中)。
ps:需要注意文章代码中的日志输出函数,产品代码中如果需要使用的话,需要考虑线程安全性(多任务安全性),因为中断/任务切换可能发生在另一个任务正在输出日志但还未输出完的时候,这就可能造成日志错乱
FreeRTOS交流QQ群-663806972