FreeRTOS的任务调度和管理
何为抢占式调度:
基于FreeRTOS的嵌入式应用,基本上都会打开抢占配置开关。即FreeRTOSConfig.h文件中的:#define configUSE_PREEMPTION 1
开启该配置后,FreeRTOS的任务调度即为:基于优先级的抢占式调度。即任何时候,系统运行的都是当前所有处于就绪状态的任务中,优先级最高的那个任务。系统允许的优先级个数也是在FreeRTOSConfig.h文件,例如:#define configMAX_PRIORITIES ( 5 )
备注:创建任务时,可以设置的优先级范围是:[0, configMAX_PRIORITIES-1]
下面是一些高优先级任务抢占低优先级任务的例子:
main函数中,创建了优先级为3的任务A,和优先级为2的任务B,优先级为1的任务C。当调用
vTaskStartScheduler()启动任务调度后,任务A会先运行,即优先级高的先运行。其它任务则处于就绪态,等待运行。任务A 任务B 任务C 优先级:3 优先级:2 优先级:1 运行状态 就绪状态 就绪状态 只要任务A在执行实际的运算,内核就会让它一直运行,任务B和C就处于就绪状态(等待被调度)。
如果任务A调用了休眠函数vTaskDelay(1秒),或者其它会导致任务需要等待的函数(如获取一个已经被其它任务占用的互斥量,等待一个空的消息队列有数据等)。那么,此时内核就会让任务A进入阻塞状态(表明任务在等待某个资源,或只是单纯的delay一段时间),不再占用cpu了。调度器会在当前就绪的任务中选择一个优先级最高的,这里会选择任务B(就绪态变为运行态),让其运行。而任务C继续处于就绪状态。任务A 任务B 任务C 优先级:3 优先级:2 优先级:1 阻塞状态 运行状态 就绪状态 当任务A delay的时间到期时,调度器会先将任务 A 的状态由阻塞态变为为就绪态。之后,会检查当前所有处于就绪态的任务的优先级,选择其中最高的任务运行,此时任务A 被选中,其状态又从就绪态变为运行态。
任务B 的运行被抢占了,其状态由运行态变为就绪态。
任务C 仍旧保持就绪态任务A 任务B 任务C 优先级:3 优先级:2 优先级:1 运行状态 就绪状态 就绪状态 某个时刻,代码的执行逻辑中又调用
xTaskCreate创建了一个任务D,并且其优先级为 4。当任务D被创建完成后,其状态为就绪态,内核检查当前所有处于就绪状态的任务的优先级,选中其中优先级最高的任务D 来运行。
即任务 A的运行又被新创建的更高优先级的任务D 抢占了,任务A变为就绪态。
任务B、C仍旧保持就绪态。任务D 任务A 任务B 任务C 优先级:4 优先级:3 优先级:2 优先级:1 运行状态 就绪状态 就绪状态 就绪状态 又在某个时刻,代码的执行逻辑中又创建了一个任务E,并且其优先级也是4,那么此时任务列表中存在两个同为最高优先级的任务(任务D、E)。FreeRTOS的默认是会轮流调度这两个任务(
configUSE_TIME_SLICING 没有配置的情况下默认会设置为1)。
如果在FreeRTOSConfig.h中明确配置#define configUSE_TIME_SLICING 0,那么任务E 创建后也会一直处于就绪态,不会被运行。内核会继续保持运行当前最高优先级的任务D。(即不会在D、E之间轮流调度)
FreeRTOS的任务状态的转换逻辑:
通过前面优先级抢占的例子,基本上也解释了任务不同状态间的转换,FreeRTOS任务的状态转变概括如下图: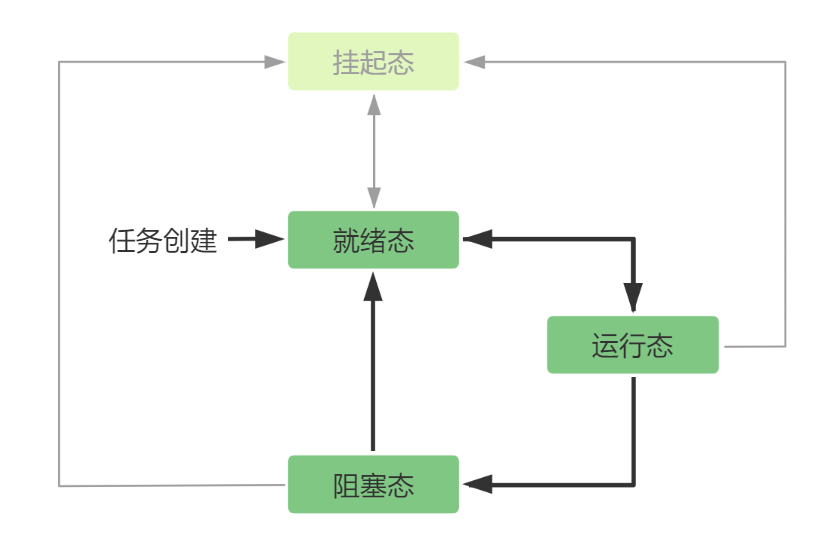
大多数情况下,我们只需要考虑 运行态、就绪态 和 阻塞态。
运行态(Running):即任务当前占有CPU,正在运行。被选中运行的任务,一定是所有处于就绪态任务中优先级最高的那个任务(如果存在多个,默认会被轮流选择)。所以,运行态一定是从就绪态转变过来的。
就绪态(Ready):任务创建成功后,即处于就绪态,即任务运行需要的所有其它资源都准备好了,就等获得CPU执行实际代码了。
如果当前创建的这个任务的优先级是最高的,该任务就会立刻获得CPU(抢占当前正在运行的那个任务),从而变为运行态。而被抢占的任务则变为就绪态。阻塞态(Blocked):FreeRTOS中有两种情况会使任务进行阻塞态。一种是主动休眠,另一种是等待某个资源可用(等待消息队列有数据,等待互斥量可用等)。
- 当正在运行的任务A调用
vTaskDelay函数后,任务就进入阻塞态了,在休眠的这段时间,任务没有做任何事情,这段时间如果继续占有CPU,就浪费资源了。FreeRTOS调度器会从剩下的就绪态任务中选择优先级最高的任务,并运行它。
当任务A的休眠时间到期时,调度器会将其变为就绪态,并检查该任务是否是当前优先级最高的。如果是优先级最高的,调度器就会让任务A再次占有CPU并运行(被抢占的任务则转变为就绪态,等待将来被调度运行)。
- 当正在运行的任务A调用
xQueueReceive从某个队列中获取数 据,而队列当前没有数据,如果任务设置了等待有数据的超时时间。那么任务就会进入阻塞态。在队列有数据之前,或者超时时间到期之前,任务什么也不能做,这时还继续占用CPU就浪费资源了。FreeRTOS调度器会从剩下的就绪态任务中选择优先级最高的任务,并运行它。
某个时刻队列有数据了,或者等待超时时间到了,那么任务就会从阻塞态转变为就绪态,调度器会检查它是否是当前所有任务中最高优先级的,如果是,调度器就会让任务A再次占有CPU并运行(被抢占的任务则变为就绪态,等待被调度运行)。
- 当正在运行的任务A调用
对于挂起状态(Suspended)很少会用到,学习的话可以先了解下就行。处于挂起状态的任务,不管其优先级如何,都会被排除在系统调度之外,即永远不会被调度。
通过FreeRTOS提供的API:vTaskSuspend( TaskHandle_t xTaskToSuspend ),可以让任务挂起,不再被调度。其中参数为某个任务的句柄(用来唯一标识一个任务,任务创建API:xTaskCreate在成功创建一个任务时,会生成对应任务的句柄)。如果为NULL,则表示将自己挂起。
通过FreeRTOS提供的API:vTaskResume( TaskHandle_t xTaskToResume )可以让某个被挂起的任务恢复成就绪状态,从而可以参与后续的调度(如果传入的任务句柄所标识的任务并不是处于挂起状态,则什么也不做。例如,如果你传入了一个处于阻塞态的任务句柄,该函数不会起作用,任务仍旧处于阻塞态)。
FreeRTOS任务状态在内核上的实际实现
前面所述的任务状态,都是逻辑上抽象出来的概念。在FreeRTOS内核的实际实现中,并不是通过记录任务状态来管理任务的。内核是通过实现不同类别的任务队列,来隐式表示任务状态的。
内核中存在多种和任务相关的队列:就绪任务队列、延迟(delayed)任务队列、挂起任务队列、等待删除任务队列。
还有一种是资源(如消息队列资源,信号量资源)内维护的队列。例如一个消息队列,其内部就会维护一个等待发送数据的任务队列,和等待接收数据的任务队列。当消息队列中没有数据时,如果任务A调用xQueueReceive从队列中获取数据,那么任务A就会被挂载到该消息队列内部维护的等待接收数据任务队列上,这样当消息队列中有数据后,就能立刻通知等待数据的任务。同理,如果消息队列已经满了,此时任务A调用xQueueSend往消息队列中发送数据,那么任务A就会被挂载到该消息队列内部维护的等待发送数据任务队列上,如此,当消息队列有空闲位置时,就能立刻通知等待发送数据的任务。
运行态的任务由于只有一个(单核MCU),所以只需要一个全局指针,指向当前正在运行的任务即可,并不需要专用队列。
当任务被 当前运行任务指针指向,即当前在运行,则处于 运行态。
当任务被挂载到 就绪队列 中时,即处于就绪态,内核调度器总是从就绪队列中选择优先级最高的任务来运行。
当任务被挂载到 挂起队列 中时,即处于挂起态。
当任务被挂载到 延迟队列 或 某种资源内部维护的任务队列时, 均处于阻塞态。
当任务被删除时,如果是自己删除自己,即调用vTaskDelete(NULL)(参数为 NULL 就是删除自己),就会被挂载到等待删除队列。删除一个任务就是释放这个任务占用的内核资源(任务控制块,任务栈空间),调用vTaskDelete删除其它任务时,可以立刻释放删除任务所占用的资源,因为要删除的任务并没有在运行。但是删除自己就不行了,因为代码的执行本身是依赖于任务的控制块以及任务栈空间,但现在又要去释放它们。所以FreeRTOS的做法是,当任务调用vTaskDelete(NULL) 删除自己时,就会被挂到等待删除任务队列上(不会再被内核调度了),某一个时刻,系统中没有其它高优先级任务在运行或处于就绪态时,内核会运行自己在启动时创建的 idle 任务(优先级为0,最低优先级),该任务中会检查 等待删除任务队列中是否有挂载任务,有的话就释放它们所占用的资源(即对于删除自己的任务,FreeRTOS将其延后到系统不忙时,再由内核创建的Idle任务进行实际删除)。
等待删除任务队列:
内核自己创建的 idle 负责检查 等待删除任务队列上是否有挂载任务,如果有就执行实际的删除(释放占用的任务控制块和栈空间)操作。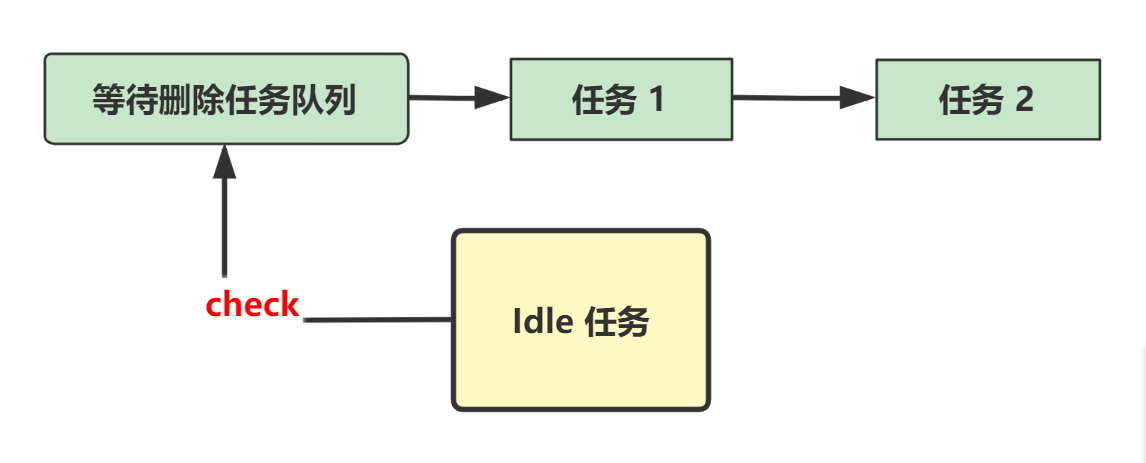
挂起任务队列:
挂起队列中保存的即那些被挂起的任务,它们永远不可能被调度运行,除非任务被恢复到就绪队列中。
就绪任务队列:
就绪队列用来保存那些处于就绪状态的任务,并且每个优先级都会有一个队列,例如FreeRTOSConfig.h文件中配置了优先级个数为 3:#define configMAX_PRIORITIES ( 3 )
则内核中会存在三个就绪任务队列。如果我们创建:
一个优先级为2的任务 A
两个优先级为1的任务 B、C
一个优先级为0的任务 D
则内核维护的三个就绪任务队列,以及当前任务指针的指向,整体状态如下图所示(实际上内核会自己创建一个idle任务。如果启用了软件定时器,内核还会创建一个timer任务,这里不考虑这两个任务):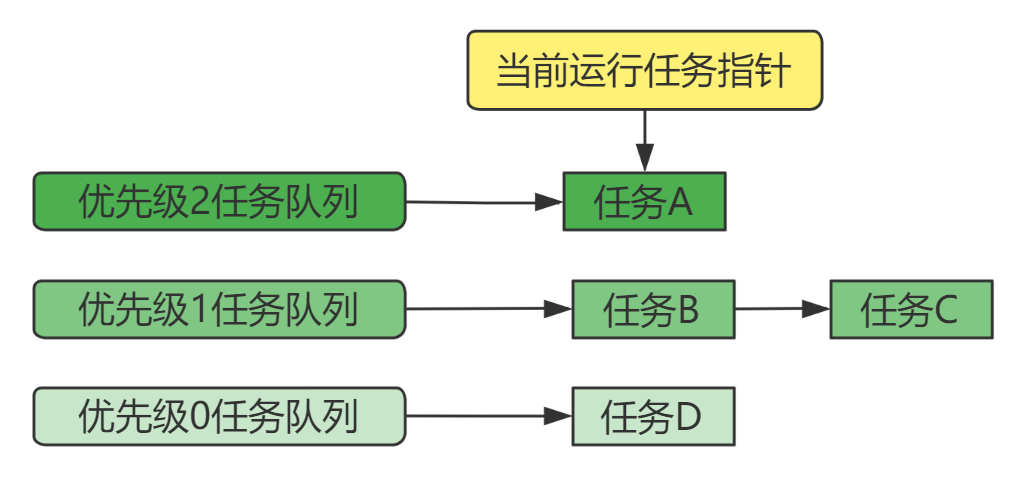
通过这种方式,内核调度器每次进行任务调度时,直接从最高优先级的就绪队列中找下一个任务运行即可(默认相同优先级的任务轮流调度)。
延迟任务队列:
例如,当任务调用vTaskDelay函数休眠时,就会被挂在 延迟任务队列 下。
内核在每次时钟tick中断时,会检查延迟队列中任务的超时值,并将等待时间到期的任务从 延迟队列 中移出,并重新加入到任务优先级对应的就绪队列中。
此外,当任务请求某种资源时,例如,调用xQueueReceive从消息队列Q中获取消息,并且设置了等待超时时间。那么当消息队列Q中没有数据时,内核也会将任务挂在 延迟队列下。这样,当等待的超时时间到期后,内核就会将任务重新挂到就绪队列下,避免了无限期等待数据。
资源内部维护的任务队列:
如前面所述,当从消息队列Q中请求数据,但是消息队列Q为空,如果设置了等待超时。那么,任务会被 挂在到延迟任务队列中(用来检测是否超时),同时也会被挂载到消息队列Q内部维护的等待接收任务队列中(这样Q一有数据,就能通过该队列通知等待数据的任务)。
例如,当消息队列Q为空时,高优先级任务X 和低优先级任务Y 均请求获取数据,则它们挂载到消息队列Q的状态如下图所示(实际执行逻辑应该是任务X 在运行时请求消息队列获取数据,由于没有数据,则进入阻塞态。内核切换到任务Y运行,任务Y也请求消息队列获取数据,同样进入阻塞态)。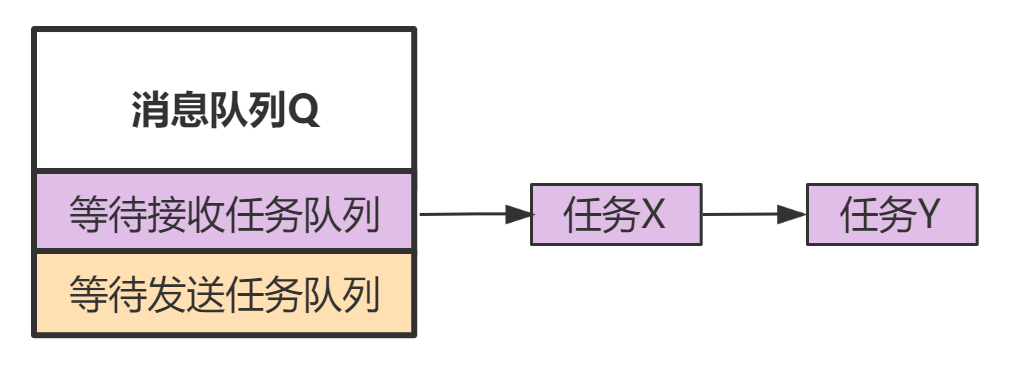
任务X和任务Y在等待接收数据队列中是按优先级排序的。这样,当消息队列有数据时,即可以最先通知优先级高的任务来提取数据。
同理,当消息队列Q为满时,已经不能再往队列里发送数据了。此时,如果任务Z 向消息队列请求发送数据,则会进入阻塞态,并被挂载到Q的等待发送任务队列中(这样Q已有空闲空间,就可以通知任务Z)。如下图所示: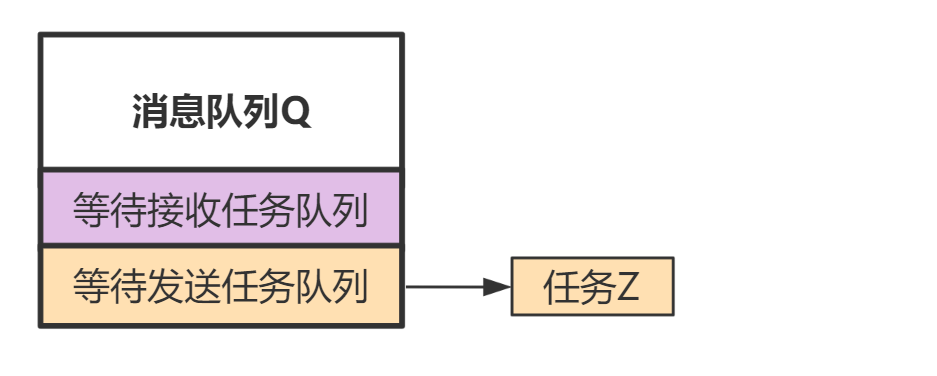
即任务对于资源的请求,如果不能立刻获取到,并且设置了等待时间,任务会被同时挂载到 延迟队列,以及资源内部队列中。
挂载到延迟任务队列中,是为了让任务在等待资源可用时,可以设置等待超时。让任务可以在超时时间到期后,即使资源不可用,也会退出等待。
挂载到资源内部的任务队列中,是为了当资源可用时,可以立刻通知等待该资源的任务。
FreeRTOS交流QQ群-663806972