为什么使用嵌入式实时操作系统(RTOS)
1 RTOS的作用
这里我们只讨论支持多任务的嵌入式实时操作系统(RTOS),如何理解多任务呢?以PC上的例子来说更容易理解。例如,你一边播放音乐,同时也在一边编辑文字。不管底层它们到底是真的并行,还是单核下的分时复用(并发),从体验上来看,这两个任务在你的PC上就像是在同时运行,这就是多任务的直观体现。
那么在嵌入式系统上,基于FreeRTOS这类嵌入式多任务操作系统进行应用开发有什么好处呢? 毕竟,RTOS本身是需要占用存储和CPU资源的。一个重要的理由是:多任务操作系统,是将任务、通信机制等基础功能/模块实现好了,开发者基于这一套框架,可以将更多的精力集中在业务功能设计上,加速产品的开发,也利于系统的长期迭代和维护。
以一个环境采集监控系统为例,不使用RTOS的裸机程序,通常就是在Main 函数中实现一个无限循环,周期性(例如通过定时器)地采集诸如温度、湿度、气压、等传传感器的数据,处理数据后,再通过显示设备对数据进行展示(例如通过 LCD)。不同模块的功能代码容易相互交织混合再一起,对于功能简单的小型项目来说这也没太大问题。
但随着产品功能迭代,会逐渐出现各种新增需求。例如,增加一个用户输入功能(用来实时配置采集传感器的参数,或用来修改显示模式)。又例如,在检测到温度高于某个临界值后,闪烁红灯;在检测温度低于某个临界值后,闪烁绿灯。
当这种需求越来越多,代码就可能会逐渐变得混乱不堪,让其他人难以理解。(对于初始开发者来说,自己是很容易理解,但对于后续维护者来说,他没有经历整个需求迭代过程,裸机实现的各种模块、功能地相互交织/影响/依赖,会给维护者带来很大地理解障碍)
基于FreeRTOS这类多任务操作系统,我们可以将上述应用拆分成多个逻辑清晰的子任务。例如,一个温度采集任务,一个湿度采集任务,一个气压采集任务,一个中控任务,一个输入管理任务,一个输出管理任务等。(如果每个传感器的数据采集任务都很简单,可以将它们合并成一个采集任务)每个任务的功能/职责划分清晰。
如果任务间需要通信/交互,可以通过RTOS提供的任务间通讯机制(例如消息队列)进行通讯,这样可以尽量减少任务(功能)间的耦合,实现任务(功能)间解耦。例如下图: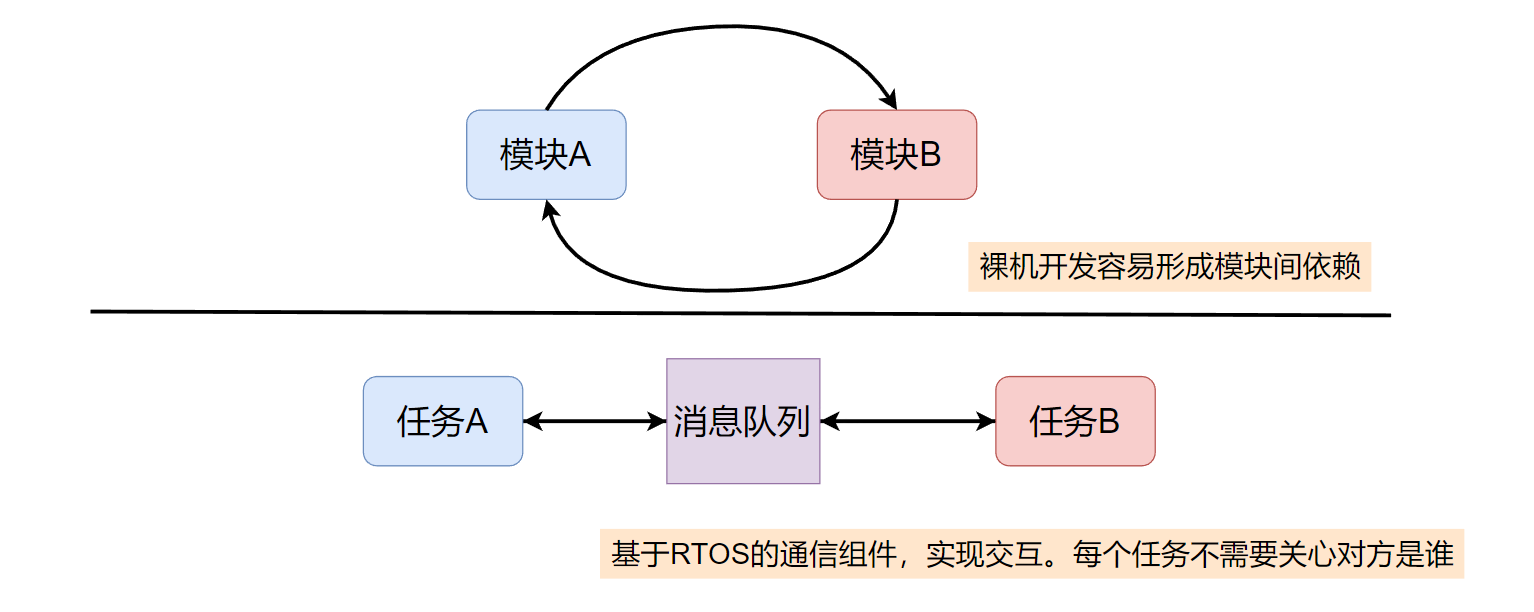
上图中,裸机环境下直接开发,不同功能模块间直接交互,容易出现较强的耦合/依赖。
而RTOS开发模式下,通过使用“通信组件”,可以很大程度的减少任务间的耦合。例如,当约定好每个任务的数据处理格式后,对于任务A来说,它只要从目标“消息队列”中取出数据进行相应解析/处理即可,完全不用关心数据是谁发给它的。发送数据时也是如此,任务A按照约定的格式,将数据发往某个目标“消息队列”中即可,至于到底是谁处理这个消息,任务A也不用关心。
同时,由于各个功能以独立的任务来实现,在软件的后期迭代中,当需要修改某个功能的代码时(例如修改温度采集相关功能的代码),只需要修改对应任务中的相关逻辑。可以不影响其它功能的逻辑(各个功能都实现成了独立的任务,在代码层面已经相互分离)。
注意!!!!:并不是说裸机开发就一定会造成系统混乱、功能相互耦合。对于开发经验丰富,有过一定架构经验的程序员来说,即使在裸机环境下,也能开发出易于维护,模块间耦合度低的系统。 但是,对于经验欠缺的程序员,在裸机开发环境下,还是很容易开发出高度耦合(相互依赖/关联)的多个模块。
而RTOS由于本身就抽象出来了“任务”的概念,并且自带了很多“标准的”基础模块,基于这些现成的基础功能,我们可以相对更容易地开发出一个设计良好,逻辑清晰并且任务/功能间耦合度低的系统。
2 如何定义功能间的耦合
个人理解:耦合是功能/模块间,形成了高度的关联或依赖。一个软件系统中是无法完全去除耦合的,因为模块之间总是需要交互的,我们需要做的是减少模块间耦合(关联/依赖)的程度。
例如,两个设计良好的模块 A,和模块 B,它们都将各自的特性很好的封装在了内部,并且对外提供的了统一标准的 API接口。如下图所示: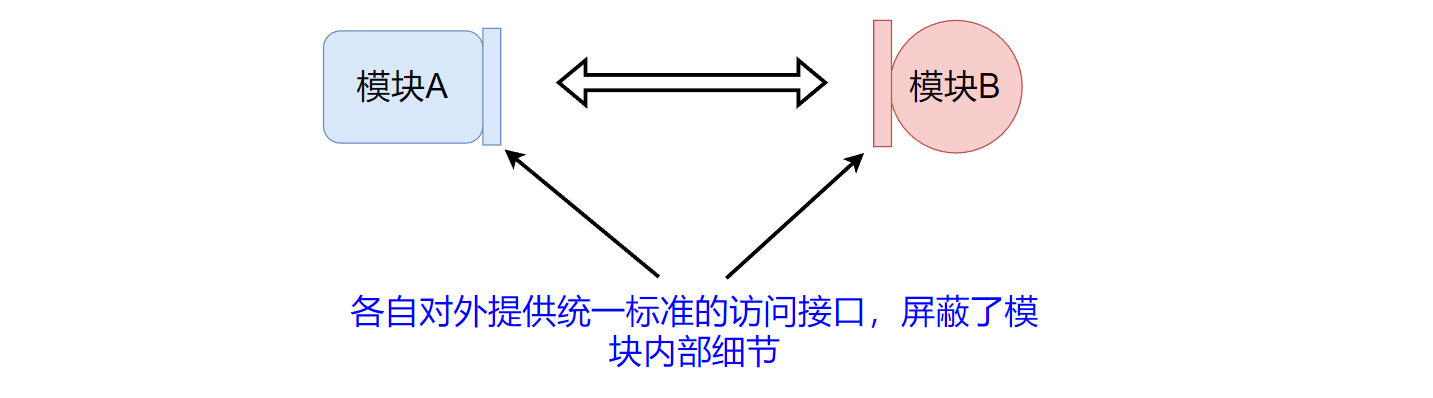
虽然A 和 B 相互调用API(具有关联/依赖了),但我们可以说它们之间的耦合程度很低。任意一个模块的内部修改了,只要保持它当前已有的 API 的行为没变,那么,对另一个模块来说它就完全感知不到对方的修改,也不需要关心对方的修改(因为现有API行为和以前一致)。
反之,如果它们的访问方式比较随意,例如直接访问对方模块内部的一些特性(内部特性往往易变),就容易形成模块间高度的耦合,如下图所示: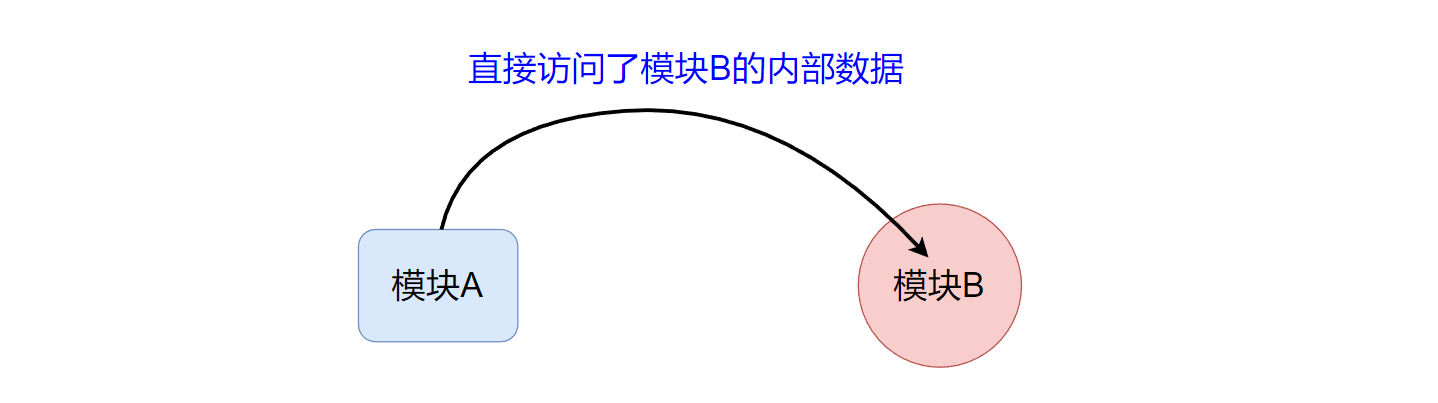
这种情况下,当我们需要修改模块 B 内部的功能时,如果这部分功能刚好模块A也在用,那么我们的修改就会影响到 A 的功能。
3 如何减少系统中的耦合?个人观点:
从单个模块(任务)功能的角度来看,单个模块应该进行良好的封装,屏蔽内部细节。 对外开放一套标准简洁的访问 API,并且在软件生命周期中保持它们行为不变(可以添加新接口,但已有接口应该保持行为不变)。
另一方面,从系统层面上来看:“基础机制”的开发因该是独立的,且行为是标准的,避免将“业务策略”直接和“基础机制”进行关联。
例如,前文提到的,“当检测到温度高于某个临界值时,闪烁红灯”,这本身是一种“业务策略”(或者说功能需求)。
而其中的“检测温度”,“闪烁红灯”则是一种“基础机制”。
这个“业务策略”(功能)需求如何实现?
方案1:一种裸机环境下,面向过程的开发方式,将这个功能需求,拆分为多个相应的功能代码段。例如:
- 实现一个周期定时器功能
- 实现一个温度传感器数据获取功能
- 对温度数据进行处理和判断
- 实现控制红灯进行周期闪烁的功能。
最终,将这几个功能代码段的逻辑串起来,就实现了需要的“业务策略”(功能需求)。
那如果后续再来一个类似的需求呢,例如:“当检测到气压低于某个阈值,闪烁绿灯”。再实现一套上面的代码逻辑?那么就会造成下图的状况: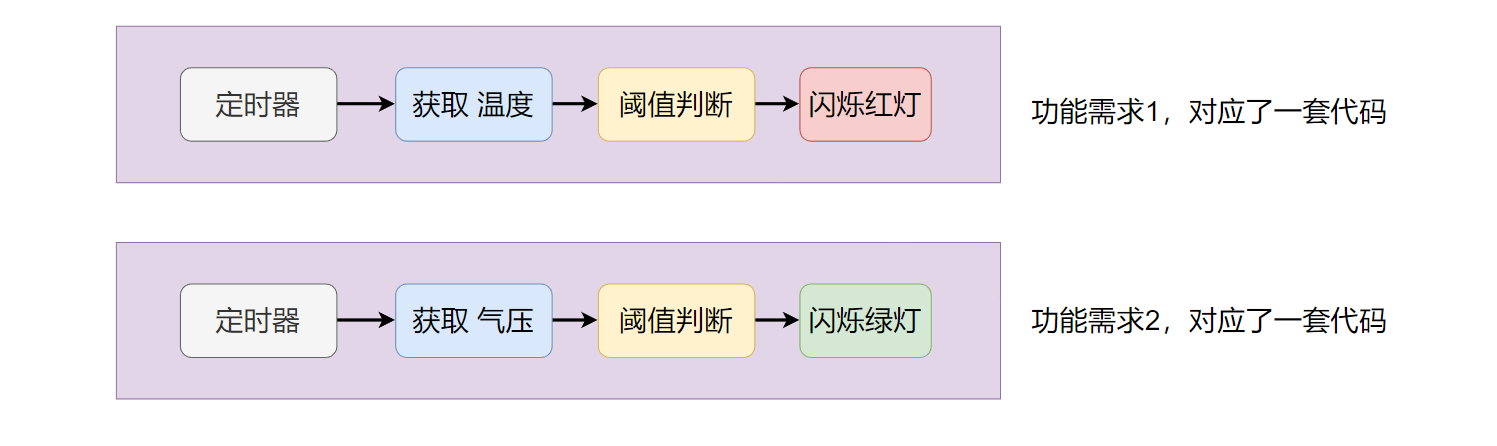
随着需求逐渐增多,长期维护后,最终会存在类似上图的多套逻辑功能类似的代码。
而造成这种情况的本质,是我们将“业务策略”和“基础机制”进行了直接关连。 即我们对“基础机制”(传感器数据获取,灯控制)的开发是面向“业务策略”的,而不是独立的开发这些基础机制。
说起来比较抽象,我们直接看另外一种“业务策略”和“基础机制”解耦的实现方式,例如:
方案2:
首先独立的定义三个“基础机制”任务,它们与具体的业务策略无关:
温度采集 是一个独立的任务(“基础机制”任务),该任务负责周期性采集数据,并放到温度数据消息邮箱中。(不需要关心谁会用这个数据)
气压采集 是一个独立的任务(“基础机制”任务),该任务负责周期性采集数据,并放到气压数据消息邮箱中。(不需要关心谁会用这个数据)
各种指示灯的状态控制,是一个独立任务(“基础机制任务”),该任务从专用指示灯命令消息队列中获取“控制命令”,根据控制命令控制灯的状态。(不关心命令是谁发过来的)
而“业务策略”任务,内部实现具体的业务逻辑。例如,从温度/气压消息邮箱中获取数据,根据数据做逻辑判断,构建指示灯控制命令发到指示灯命令消息队列中。对业务来说,他不关心传感器数据怎么生成的,他能获取到即可。也不关心指示灯状态实际是怎么控制的,他只要发出相应控制命令即可。
上述逻辑地整体结构,如下图所示: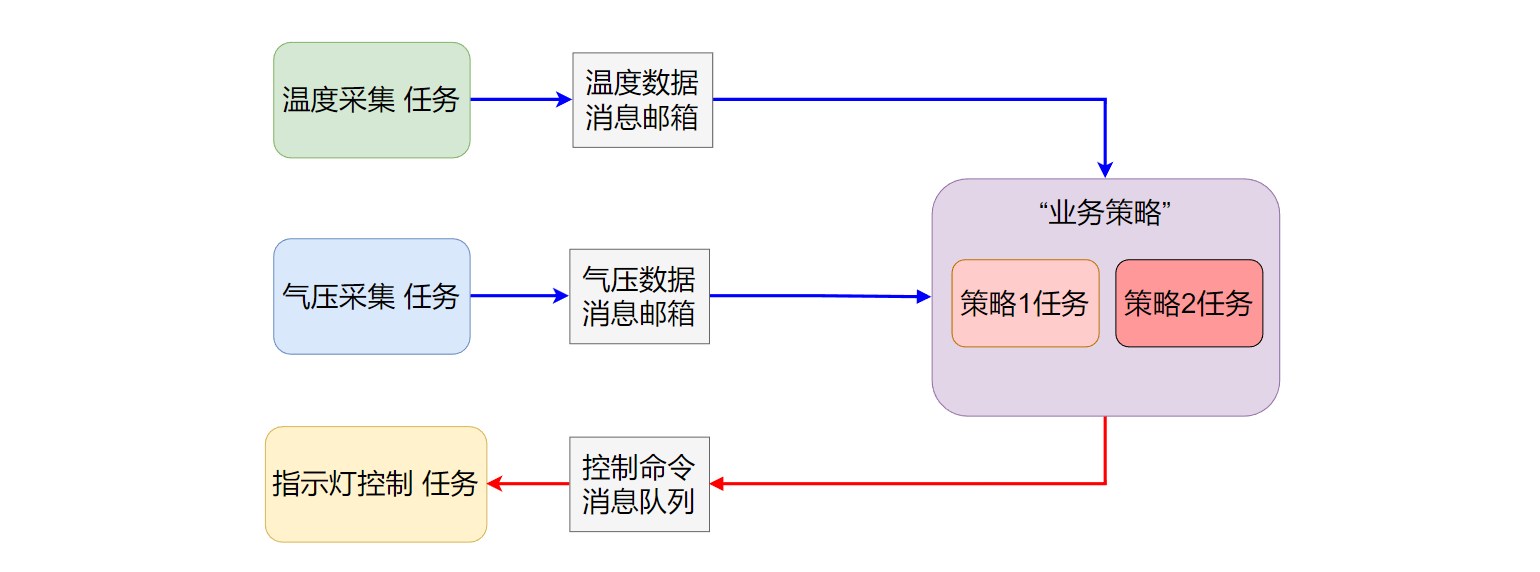
如上图所示的结构,任务的职责划分更清晰,且没有相互依赖。
温度/气压采集任务只负责采集数据后,放入目标邮箱即可,后续谁会用?怎么处理?都和它们无关,即它们与下游数据使用方解耦了。
指示灯控制任务只需要从目标消息队列中取出控制命令并执行即可,谁发送的控制命令?为什么控制?它也不需要关心,即它和上游控制来源方解耦了。
而策略任务,对它来说输入数据的来源是抽象的(从专用邮箱中获取到的,不用关心具体的硬件传感器),输出数据(或控制行为)也是抽象的(发送命令到专用消息队列中)。它不用关心,传感器数据是如何采集出来的,也不用关心灯的状态到底是如何控制的,即业务逻辑和具体的底层基础机制解耦了。
方案1 和 方案2 看起来最终的调用逻辑是一样的,都是:获取数据,业务逻辑判断,控制灯的状态。
但两种方案的实现思路,思考逻辑是不同的。
PS:减少系统中不同功能间的耦合度,属于一个工程性问题。工程性问题需要结合具体业务、系统、资源来考虑,并没有一个标准答案,本文只是提供了个人的一种思考方式。
总结
通过 RTOS 提供的任务机制,我们可以方便地将需要实现的应用,进行功能抽象并拆分成多个独立的,职责单一/明确的子任务。再通过 RTOS 提供的基础通信、同步等功能组件,实现将各个子任务进行解耦,最大可能地减少它们之间地耦合程度。
这让我们可以更容易(相对裸机环境)地掌控对中/大型应用地开发,也更利于产品的长期维护和功能迭代。
FreeRTOS交流QQ群-663806972